分類
機能
ビジョン処理による移動ステップの前に分類し、または把持している対象物の情報に応じて分岐を選択するために使用します。
使用シーン
以下のようなシーンに使用できます。
-
ビジョン処理による移動ステップの前に使用する:対象物認識、分岐を選択して実行する、把持するというワークフローを実行します。 例:異なる部品を把持するシーンでグリッパを交換する場合に使用します。
-
ビジョン処理による移動ステップの前に使用する:対象物認識、把持点の順序で対象物を分類する、各出口から実行するというワークフローを実行します。 例えば、分類を実行した後、ビジョン処理の結果の把持点の順番に従って経路を計画する場合に使用します。
-
ビジョン処理による移動ステップの後ろに使用する:対象物認識、把持する、対象物情報によって分類するというワークフローを実行します。 例えば、グリッパを変更せず、対象物を分類してから異なるコンテナに配置する場合に使用します。
| 「対象物情報」には、対象物の名前、把持点の名前トラベルが含まれます。 |
パラメータ説明
使用モード
「ビジョン処理による移動」の前に自動分類と把持されている対象物によって分岐を選択があります。
クリックして「ビジョン処理による移動」の前に自動分類を選択した時に他のパラメータの詳細説明を確認します。
「分類」ステップがビジョン処理による移動の前に配置された場合に選択してください。選択すると、「分類」ステップとビジョン処理による移動の間に、経路の計画を中断するようなステップを配置しないでください。
ステップ名を選択
合わせて使用するビジョン処理による移動ステップを選択します。
分岐選択の基準
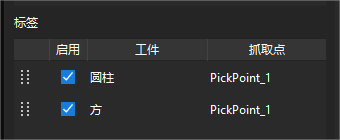
対象物と把持点の名称を選択するとワークライブラリで設定した対象物と把持点の名前によって分類します。
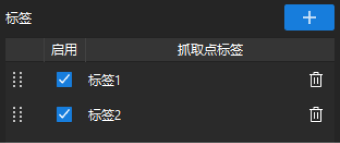
把持点のラベルを選択するとディープラーニングのラベルまたはワークライブラリで設定した数字ラベルによって分類します。
| 「対象物と把持点の名称」によって分類 | 「把持点のラベル」によって分類 |
|---|---|
|
|
データをソート
「ビジョン処理による移動」の前に自動分類を選択した時にのみ使用できます。分類の結果を計画のために使用する順番を決めます。
把持点の順序 |
「分類」ステップは、ビジョン処理の結果にある把持点の順序に基づいて後続の計画に使用する。例えば、ビジョン処理の結果の把持点順序が 1-C、2-A、3-B だとすると、計画の順序は 1-C、2-A、3-B となる |
出口の順番 |
「分類」ステップは現在のステップの出口の順序(左から)で把持点を試行する。例えば、ビジョン処理の結果の把持点順序が 1-C、2-C、3-A、4-B、5-A、6-B で、現在のステップの出口が対応する把持点の名称が A、B、C だとすると、計画の順序は 3-A、5-A、4-B、6-B、1-C、2-C となる |
| 以上の例には、英文文字は対象物と把持点の名称または把持点のラベルを表し、数字はそれらがビジョン処理の結果のにおける順序を表します。 |
ラベル
-
分岐選択の基準が対象物と把持点の名称の場合、ワークライブラリで設定した対象物と対応する把持点はこのエリアに表示されます。 有効にするをオフにすると、「分類」ステップの出口は少なくなります。
-
分岐選択の基準が把持点のラベルの場合、ラベルをカスタマイズできます。ただ、ディープラーニングのラベルまたはワークライブラリで設定した数字ラベルと一致される必要があります。有効にするをオフにすると、「分類」ステップの出口は少なくなります。
ラベルを追加する  ボタンをクリックして追加します。
ボタンをクリックして追加します。ラベル名を編集する 把持点ラベルのラベル名をダブルクリックして編集できます。
ラベルを削除する ラベルの右の
 をクリックして削除できます。
をクリックして削除できます。ラベルの順序を調整する 左側の
 をクリックして調整できます。出口の順序も変わります。
をクリックして調整できます。出口の順序も変わります。
| 出口の順序で把持点を計画する場合、ラベルの順序を調整すると計画の順序も変わります。 |
クリックして把持されている対象物によって分岐を選択のパラメータの詳細説明を確認します。
このオプションを選択すると、「分類」ステップ実行時に把持している対象物の情報に基づいて分岐を選択します。
分岐選択の基準
対象物と把持点の名称を選択するとワークライブラリで設定した対象物と把持点の名前によって分類します。
把持点のラベルを選択するとディープラーニングのラベルまたはワークライブラリで設定した数字ラベルによって分類します。
| 「対象物と把持点の名称」によって分類 | 「把持点のラベル」によって分類 |
|---|---|
|
|
ラベル
-
分岐選択の基準が対象物と把持点の名称の場合、ワークライブラリで設定した対象物と対応する把持点はこのエリアに表示されます。 有効にするをオフにすると、「分類」ステップの出口は少なくなります。
-
分岐選択の基準が把持点のラベルの場合、ラベルをカスタマイズできます。ただ、ディープラーニングのラベルまたはワークライブラリで設定した数字ラベルと一致される必要があります。有効にするをオフにすると、「分類」ステップの出口は少なくなります。
ラベルを追加する ボタンをクリックして追加します。ラベル名を編集する 把持点ラベルのラベル名をダブルクリックして編集できます。
ラベルを削除する ラベルの右の
をクリックして削除できます。ラベルの順序を調整する 左側の
をクリックして調整できます。出口の順序も変わります。