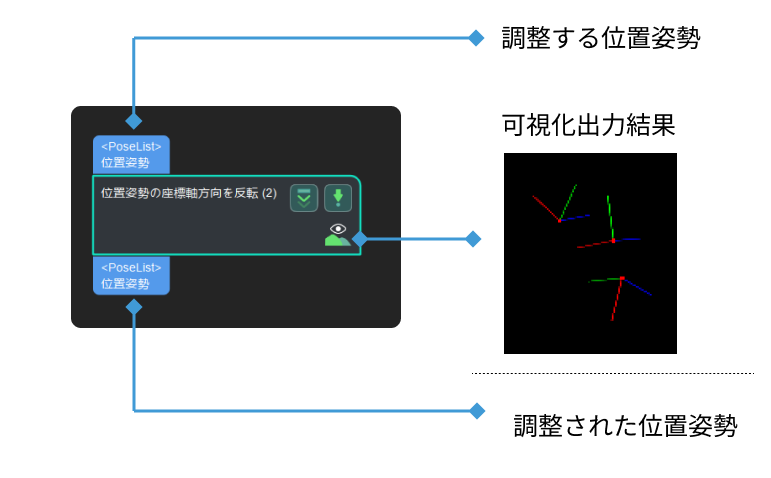
位置姿勢の座標軸方向を反転
パラメータ説明
可視化設定
- 位置姿勢表示の設定
-
初期値:出力位置姿勢のみを表示。
値のリスト:入力位置姿勢のみを表示、出力位置姿勢のみを表示、入力と出力位置姿勢をすべて表示。
調整説明:処理後の位置姿勢、処理前の位置姿勢、処理前後の全ての位置姿勢をそれぞれ表示します。
軸の設定
- 反転する軸
-
初期値:Z
オプション:X、Y、Z
調整説明:反転する座標軸を選択します。
- 方向のタイプ
-
初期値:負方向。
オプション:負方向(位置姿勢のある軸をワールド座標系の負方向に調整することを意味します。負方向との角度が90°以上の軸のみが調整されます)。正方向(位置姿勢のある軸をワールド座標系の正方向に調整することを意味します。正方向との角度が90°以上の軸のみが調整されます)。
調整説明:反転する軸の方向です。例えば、反転する軸 が Z で、方向タイプが 正方向 の場合、ワールド座標系のZ軸の正方向との角度が90°よりも小さい位置姿勢のZ軸は調整されず、角度が90よりも大きい°位置姿勢のZ軸が基準軸を中心に180°反転します。 - 回転の基準軸
-
初期値:X
オプション:X、Y、Z
調整説明:どの軸を中心に回転するかを選択します。
反転する軸と回転の基準軸は同じ軸にしてはなりません。
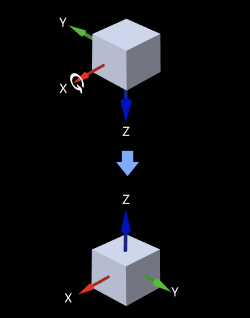
調整の例:下図に示すように、ここでZ軸を反転軸、X軸を回転軸とします。
