Mech-Vizでコンテナの位置姿勢を更新する方法
| まず、プロジェクトリソースにコンテナの シーンの物体 を追加していることを確認してください。シーンモデル を 箱 に選択し、実際の寸法と厚さを入力します。 |
以下の2つの方法で、コンテナの位置姿勢を動的に更新できます。
方法1:「ビジョン処理による移動」ステップで「ビジョン処理によるコンテナ位置姿勢を更新」機能を使用する
-
ビジョン処理による移動 ステップのパラメータで、補助的機能 > ビジョン処理によるコンテナの再度位置決め の下にある ビジョン処理によるコンテナ位置姿勢を更新 にチェックを入れます。
-
Mech-Visionでコンテナを認識するためのビジョンプロジェクトを開き、出力 ステップのパラメータを設定します。
ポータタイプが カスタム または 事前定義済み(ビジョン結果) の場合、コンテナ名前、位置姿勢およびコンテナを入力するためのポートを 出力 ステップに追加できます。
ポートタイプ が カスタム の場合
-
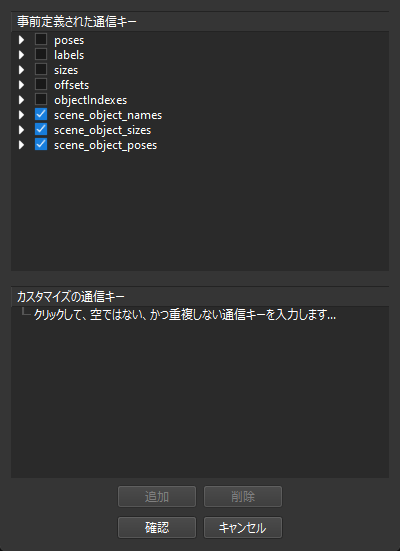
エディタを開く をクリックし、scene_object_names、scene_object_sizes および scene_object_poses にチェックを入れます。この3つの通信キーはそれぞれ、Mech-Viz内のシーンの物体の名前、寸法と位置姿勢に対応します。その中、scene_object_names にチェックを入れた後、実際の状況に応じて scene_object_sizes と scene_object_poses にチェックを入れるかどうかを選択できます。scene_object_names のみにチェックを入れた場合、シーンの物体を更新 ステップが 失敗 の出口に沿って実行されます。
-
確認 をクリックします。
ポータタイプが 事前定義済み(ビジョン結果) の場合
-
シーンの物体の更新設定 の下の シーンの物体の更新設定 にチェックを入れます。
-
新しいポートを対応するステップに接続して、シーンの物体(コンテナ)の名称、寸法、および位置姿勢をMech-Vizに出力できます。
-
方法2:「シーンの物体を更新」ステップを使用する
|
-
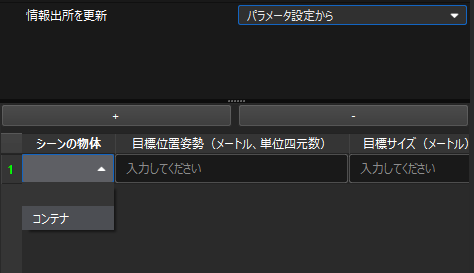
シーンの物体を更新 ステップの 情報出所を更新 が パラメータ設定から の場合、コンテナの位置姿勢と寸法は設定された 目標位置姿勢 と 目標サイズ に更新されます。
+ をクリックし、シーンの物体 で更新するコンテナを選択します。その後、目標位置姿勢 と 目標サイズ を入力します。目標位置姿勢を X,Y,Z(メートル単位)形式と四元数の7数字を入力してください。目標サイズはX,Y,Z形式の3つのサイズ情報(メートル単位)を入力してください。
-
シーンの物体を更新 ステップの 情報出所を更新 が ビジョンサービスから の場合、コンテナ位置姿勢は指定されたMech-Visionプロジェクトの認識結果によって更新されます。
-
Mech-Vizシーンの物体を更新 ステップの ビジョンサービス名 パラメータでコンテナを認識するためのビジョンプロジェクトを選択します。
-
Mech-Visionでコンテナを認識するためのビジョンプロジェクトを開き、出力 ステップのパラメータを設定します。
ポータタイプが カスタム または 事前定義済み(ビジョン結果) の場合、コンテナ名前、位置姿勢およびコンテナを入力するためのポートを 出力 ステップに追加できます。
ポートタイプ が カスタム の場合
-
エディタを開く をクリックし、scene_object_names、scene_object_sizes および scene_object_poses にチェックを入れます。この3つの通信キーはそれぞれ、Mech-Viz内のシーンの物体の名前、寸法と位置姿勢に対応します。その中、scene_object_names にチェックを入れた後、実際の状況に応じて scene_object_sizes と scene_object_poses にチェックを入れるかどうかを選択できます。scene_object_names のみにチェックを入れた場合、シーンの物体を更新 ステップが 失敗 の出口に沿って実行されます。
-
確認 をクリックします。
ポータタイプが 事前定義済み(ビジョン結果) の場合
-
シーンの物体の更新設定 の下の シーンの物体の更新設定 にチェックを入れます。
-
新しいポートを対応するステップに接続して、シーンの物体(コンテナ)の名称、寸法、および位置姿勢をMech-Vizに出力できます。
-
-
注意事項
-
コンテナ位置姿勢が把持ごとに変わる可能性がある場合、ビジョン処理による移動 ステップで「ビジョン処理によるコンテナ位置姿勢を更新」機能(方法1)を使用して、各把持の前にコンテナ位置姿勢を動的に更新することを推奨します。
-
コンテナ位置姿勢を一度だけ更新する必要がある場合、シーンの物体を更新 ステップ(方法2)を使用することを推奨します。例えば、コンテナが把持前に位置決めされ、把持中に移動しない場合、各把持前にコンテナ位置姿勢を更新する必要はありません。現場で複数のサイズのコンテナを使用する場合、方法2を使用してコンテナを認識するためのビジョンプロジェクトを別々に作成し、ワークを認識するためのビジョンプロジェクトの論理がより簡単になり、認識効率が向上します。
-
Mech-Vizで作成されたコンテナのようなシーンの物体の位置姿勢は、コンテナの幾何中心(つまり、コンテナの内部)にあります。しかし、Mech-Visionは通常、認識されたコンテナの上面開口形状に基づいてコンテナの位置姿勢を計算し、計算された位置姿勢はコンテナの上面の幾何中心点に位置します。この時、Mech-Visionの 出力 ステップを使用してコンテナの位置姿勢をMech-Vizに送信して更新する場合、一般的に 指定方向に沿って位置姿勢を移動 ステップを使用して、コンテナの上面の位置姿勢をコンテナ全体の幾何中心に調整する必要があります。
-
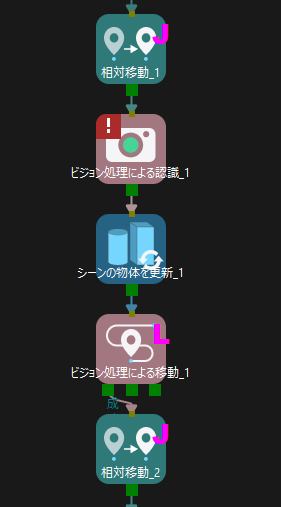
シーンの物体を更新 ステップで ビジョンサービスから コンテナ位置姿勢を取得する際、ビジョン処理による認識 ステップはビジョンサービスを呼び出す必要があります。この場合、同じMech-Visionプロジェクトを使用してコンテナとワークを認識し、シーンの物体を更新 ステップと ビジョン処理による移動 ステップの間に他の ビジョン処理による認識 ステップがない場合(下図に示すように)、シーンの物体を更新 ステップでビジョン結果が使用されるため、その後の ビジョン処理による移動 ステップでビジョン結果が使用できなくなり、エラーが報告されます。