コンテナ内のスマート経路生成
使用前提
-
このステップは、ビジョン処理による移動ステップと組合わせて使用しなければなりません。また、ビジョン処理による移動ステップのパラメータ「把持方法」を「一般的な把持」に設定しなければなりません。
-
このステップをワークフローの最後に配置してはなりません。その後ろに、経路点が決まった移動ステップを接続しなければなりません。
-
このステップを使用する時、衝突検出パネルで点群衝突検出、対象物衝突検出をオンにする必要があります。
-
コンテナ進入経路と退出経路にそれぞれコンテナ内のスマート経路生成ステップを配置してください。
|
各コンテナ内のスマート経路生成ステップは、2つの経路点に対応します。把持段階が把持の前の場合、対応する経路点はコンテナ進入点と接近点です。把持段階が把持の後の場合、対応する経路点は退出点とコンテナ退出点です。 使用する戦略によって、把持点に到着する経路点に影響します。コンテナに進入する時は接近点に、コンテナを出る時は離れる点に影響します。 ロボット通信プログラムを書く時、対応する 2つの経路点を受信するようにしてください。詳細な説明はサンプルプロジェクトをご参照ください。 |
パラメータ説明
コンテナ内の回転を許容
チェックしないとコンテナないの経路点の向きは把持点と同じです。チェックするとソフトウェアは自動的にコンテナ内の経路点向きを調整し、ロボット経路をよりスムーズにします。ロボットハンドがワークを把持している時に回転が発生するためコンテナの衝突が発生するリスクが高まり、経路計画が失敗する可能性も高くなります。
区間1/2の運動タイプ
コンテナ進入経路、つまり「把持段階」が把持の前の時、区間1の経路の運動タイプを関節運動に設定し、対して区間2を直線運動に設定することを推奨します。
コンテナ退出経路、つまり「把持段階」が把持の後の時、区間1の経路の運動タイプを直線運動に設定し、対して区間2を関節運動に設定することを推奨します。
特異点回避
運動タイプが直線運動の場合、特異点回避機能を有効にすると複数のロボット関節が直線に沿って移動するようになり、特異点を回避できます。
詳細説明
| 移動区間数の制限 | 固定 | 制限なし |
|---|---|---|
機能 |
ユーザー指定の区間数に従って直線に沿って移動します。 |
移動する区間数を自動的に計算します。 |
アドバンテージ |
|
|
ディスアドバンテージ |
|
|
| パラメータ | 説明 |
|---|---|
移動区間数 |
移動区間数の制限を固定に設定すると、ユーザーが関節運動の区間数を指定することになります。 |
位置偏差の上限 |
直線運動の経路から外れる距離の最大許容値。 位置偏差の上限の値が高いほど特異点回避の成功率は高くなり、実際の移動経路は直線から外れるようになります。 |
角度偏差の上限 |
直線運動の経路から外れる角度の最大許容値。 角度偏差の上限の値が高いほど特異点回避の成功率は高くなり、実際の移動経路は直線から外れるようになります。 |
速度&加速度
速度&加速度は、ロボット動作のスピードを決定します。普通、加速度の値を速度より小さく設定します。加速度の値を速度よりも大きくしたらロボット動作がスムーズでなくなります。
| ロボットが安定に把持を実行するように、ビジョン処理による移動ステップとその前後のステップの運動速度を低く設定してください。 |
ブレンド半径
調整説明:通常、初期値を使用すればいいです。
-
レンド半径とは、回転する位置が目標点までの距離であり、大きいほどロボットの動きはスムーズになります。ロボットが狭いスペースで動作する場合、ブレンド半径を大きく設定する必要はありません。
-
ロボットがより広いスペースで動作し、障害物がなくて 2つの経路の間に距離が遠い場合、ロボットがスムーズに動くように、ブレンド半径を大きく設定することができます。
把持段階
コンテナに入ってワークを把持する前に、把持の前を選択します。すると「コンテナ内のスナート経路生成」ステップをビジョン処理による移動ステップの前に配置しなければなりません。 ワークを把持してコンテナを出る前に、把持の後を選択します。すると「コンテナ内のスナート経路生成」ステップをビジョン処理による移動ステップの後ろに配置しなければなりません。
コンテナを選択する
ソースツリーのシーンの物体に追加されたコンテナを選択します。具体的な操作方法については、シーンの物体を追加するをご参照ください。
戦略モード
-
自動を選択すれば、対象物把持の経路を自動的に計算します。
この時の把持戦略は以下のようになります。自動モードの場合、ソフトウェアは異なるコンテナを離れる戦略を試行します。
進入戦略 退出戦略 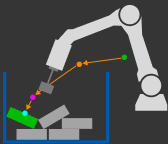
把持点のZ方向に沿って進入する:把持点のZ方向に沿って進入し、ワークの上部で衝突が発生しない位置を見つける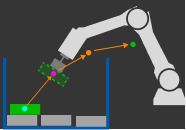
コンテナから遠ざかって持ち上げる:コンテナと衝突しないように、コンテナ中心の上に向かって持ち上げる。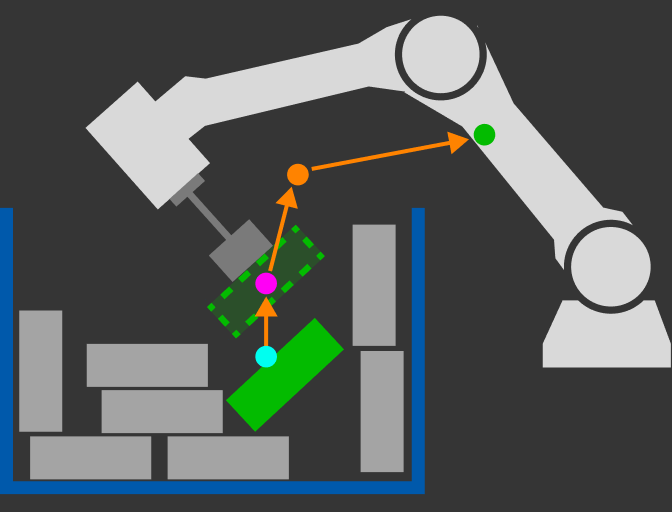
世界座標系のZ方向に沿って持ち上げる:世界座標系の Z 方向に沿って持ち上げを試行する -
手動を選択した場合、少なくとも 1つの把持戦略を選択します。戦略を選択でき、また異なる運動距離を設定できます。自動モードに比べ、手動モードには把持点のZ方向に沿って持ち上げると水平にドラッグするが追加されました。
以下の場合には手動を推奨します。
-
ロボットが把持点の Z 方向に沿って退出するよう設定したい場合、把持点のZ方向に沿って持ち上げる戦略を追加します。
-
ロボットが積み重ねられたワークを水平方向に取り出したい場合は、水平にドラッグする戦略を追加します。
-
ワークが高くて自動計算した持ち上げ試行距離が足りない場合、手動で持ち上げ試行距離を設定してください。
-
タクトを改善するために 1つだけの戦略を試行したい場合。
手動モードを選択した時の把持戦略は以下のようです。
進入戦略 退出戦略
把持点のZ方向に沿って進入する:把持点のZ方向に沿って進入し、ワークの上部で衝突が発生しない位置を見つける。最大で 5つの対象物の上方の距離を設定でき、距離が短い順で試行する
コンテナから遠ざかって持ち上げる:コンテナと衝突しないように、コンテナ中心の上に向かって持ち上げる。最大で 5つの持ち上げ試行距離を設定でき、距離が短い順で試行する
世界座標系のZ方向に沿って持ち上げる:世界座標系の Z 方向に沿って持ち上げを試行する。最大で 5つの持ち上げ試行距離を設定でき、距離が短い順で試行する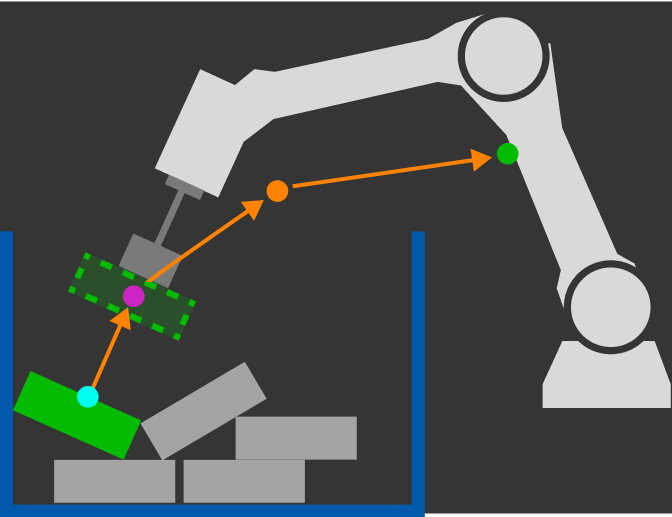
把持点のZ方向に沿って持ち上げる:把持点の Z 方向に沿って対象物を持ち上げる。最大で 5つの持ち上げ試行距離を設定でき、距離が短い順で試行する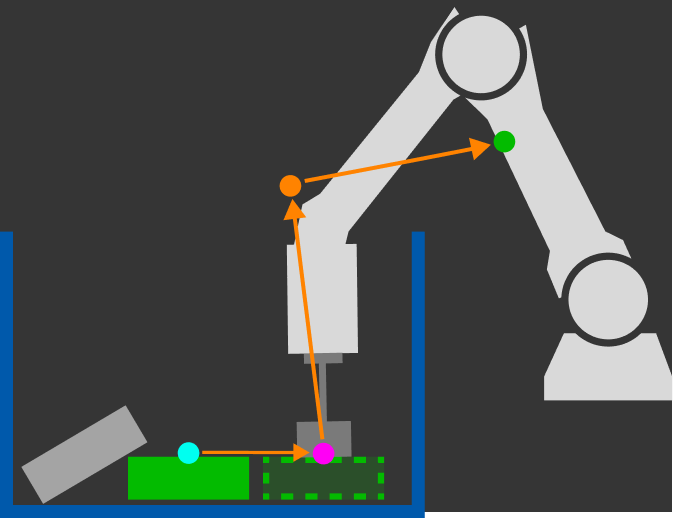
水平にドラッグする:対象物把持点がある水平面においてコンテナ中心に向かって対象物をドラッグする。最大で 5つのドラッグ試行距離を設定でき、距離が短い順で試行する
-
使用例
「コンテナ内のスマート経路生成」サンプルプロジェクトをお読みください。