道標を設定
機能
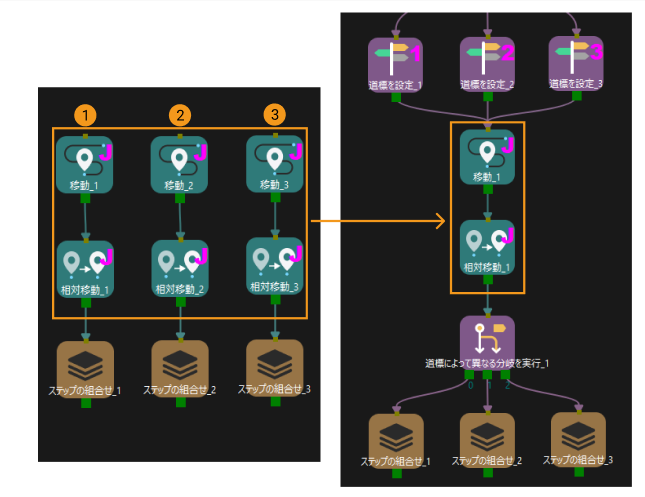
道標を設定と道標によって異なる分岐を実行を組合わせて使用し、ワークフローに道標を付けます。後続の過程で道標によって異なる分岐を実行します。
| 「道標を設定」と「道標によって異なる分岐を実行」ステップを使用するサンプルプログラムを提供しますのでご利用いただけます。ソフトウェアのファイル > 新規作成 > サンプルプログラム > ほか をクリックしてサンプルプログラムを使用します。 |
道標を設定と道標によって異なる分岐を実行を組合わせて使用し、ワークフローに道標を付けます。後続の過程で道標によって異なる分岐を実行します。
| 「道標を設定」と「道標によって異なる分岐を実行」ステップを使用するサンプルプログラムを提供しますのでご利用いただけます。ソフトウェアのファイル > 新規作成 > サンプルプログラム > ほか をクリックしてサンプルプログラムを使用します。 |