よくある問題と解決策
7軸ロボットのキャリブレーション方法
|
ここでは、7軸ロボットには6軸スライド付きロボットは含まれません。 |
7軸ロボットを使用する場合、優先的にTCPタッチ法を使用してキャリブレーションを実行することを推奨します。
現場に適切なTCP先端がない場合やTCP先端を固定できない場合は、標準キャリブレーション法を使用してキャリブレーションを実行できます。キャリブレーション過程では、1つの軸の動きを制限し、7軸ロボットを6軸ロボットとして仮定して操作します。それ以外の操作は、6軸ロボットのキャリブレーション手順とほぼ同じです。
ロボットのオイラー角のタイプが不確かな場合のキャリブレーション方法
ロボットのオイラー角のタイプが不確かな場合、カメラキャリブレーションツールの「オイラー角のタイプを計算」機能を使用して現在のロボットのオイラー角のタイプを取得します。詳細な手順は以下の通りです。
-
Mech-Visionを起動し、ツールバーの カメラキャリブレーション をクリックします。すると、キャリブレーション前の設定 画面が表示されます。
-
キャリブレーションの実行方法を選択 画面で、新なキャリブレーションを開始 を選択し、次へ をクリックします。
-
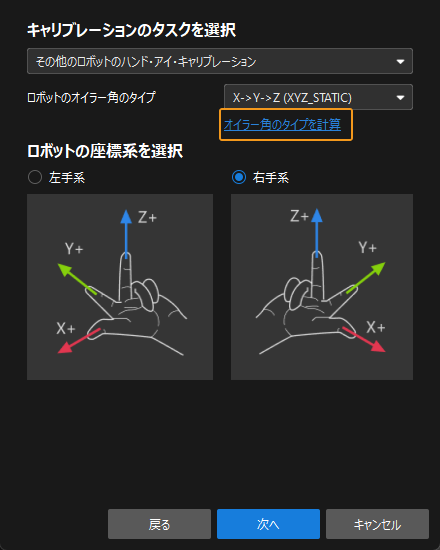
キャリブレーションのタスクを選択 画面で、ドロップダウンリストボックスから その他のロボットのハンド・アイ・キャリブレーション を選択し、オイラー角のタイプを計算 をクリックして計算ツールを開きます。
-
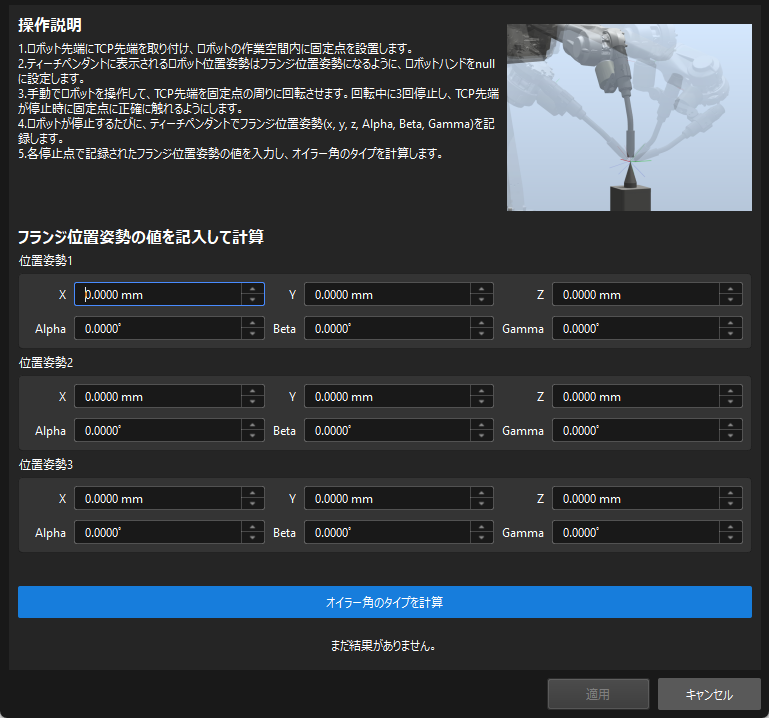
操作説明に従ってロボットの3つのフランジ位置姿勢を記録して入力し、オイラー角のタイプを計算 をクリックします。すると、ロボットのオイラー角のタイプが計算されます。