使用例
凸包モデル作成の時間を削減し、衝突検出を確実で効率的に実行するため、以下のようにモデルを簡略化することができます。
-
凸包モデルを作成する前に、モデルを全体的に評価して各部分の役割を確認しておいたほうがいいです。
-
凸包モデルを作成する時に、対象物と接触する部分(グリッパーやフランジコネクタなど)を細かい部分までしっかりと作成する必要があり、できる限りに実際の形状に沿うようにしてください。対象物と接触しない部分、またロボットに繋がらない部分(カメラ、センサー、コネクタなど)を大まかに作成すればいいです。
-
3 次元空間においては、凸包は、点の集合を含む最小の多面体です。そのエッジは、集合のエッジの点から形成されます。あんまり多くの点を指定すると必要以上大きな凸包が生成されますが少ないと不完全が凸包が生成される可能性があります。現場の必要に応じて点を選択してください。
以下では、例を挙げて詳しく説明します。
-
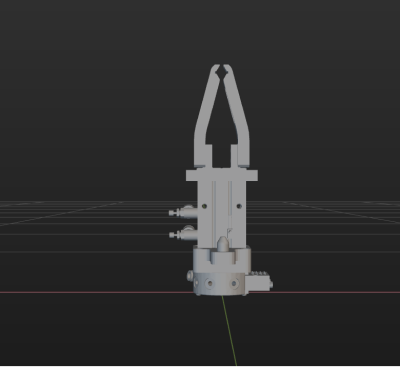
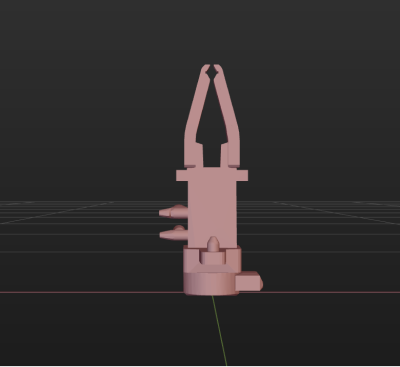
例 1:
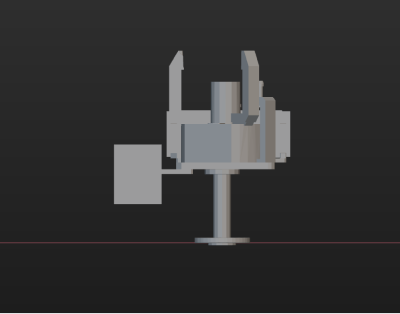
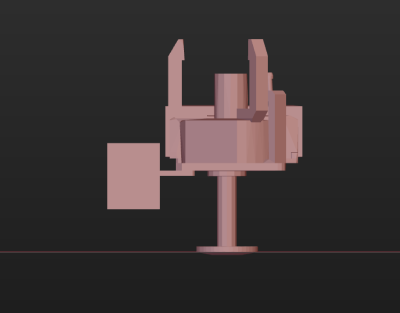
ビュー 編集前 編集後 カスタマイズビュー
正面図
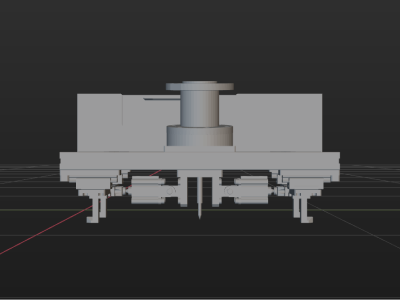
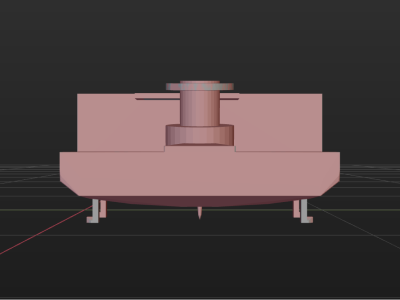
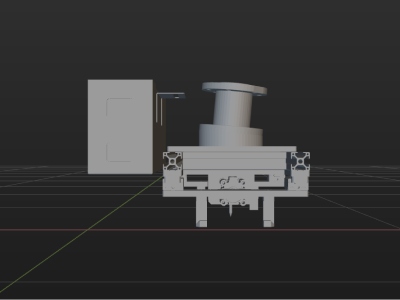
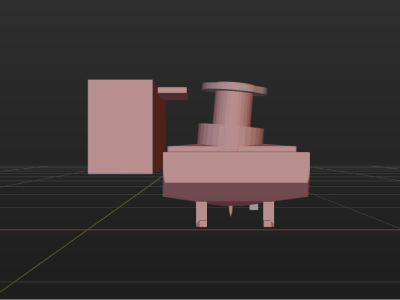
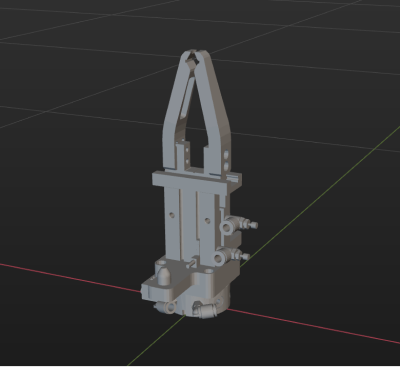
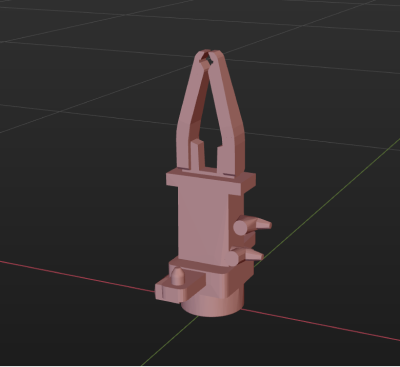
側面図
-
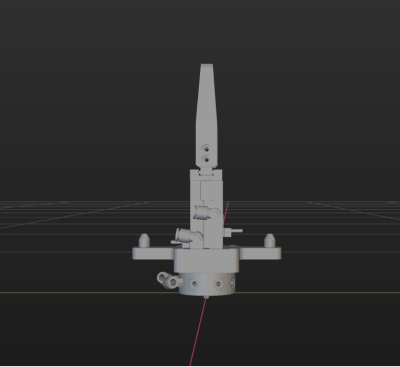
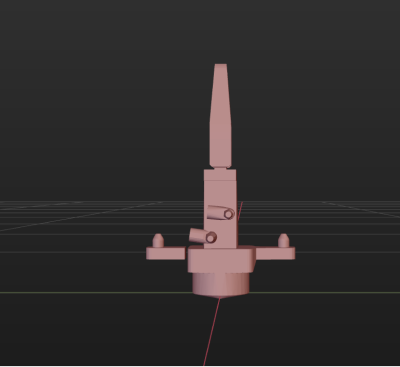
例 2:
ビュー 編集前 編集後 カスタマイズビュー
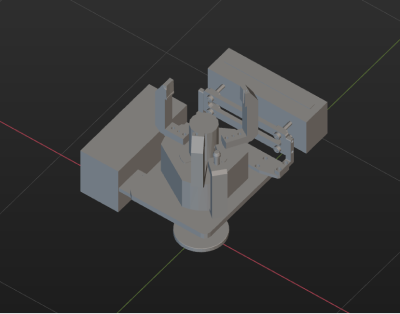
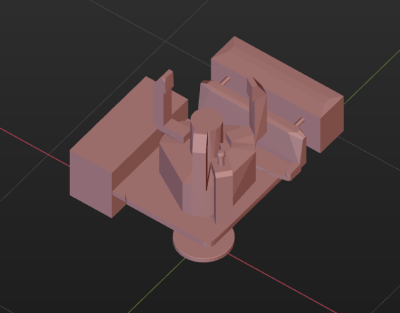
正面図
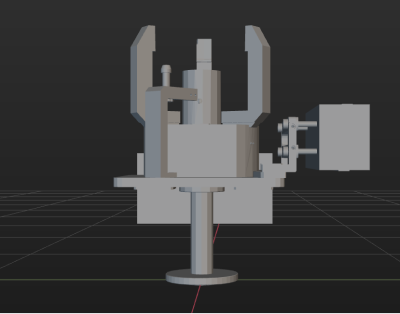
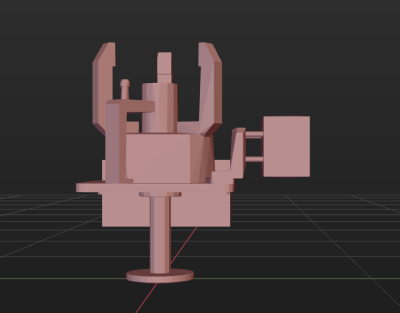
側面図
-
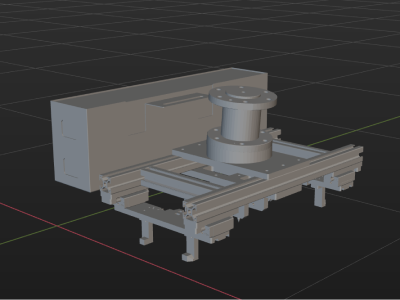
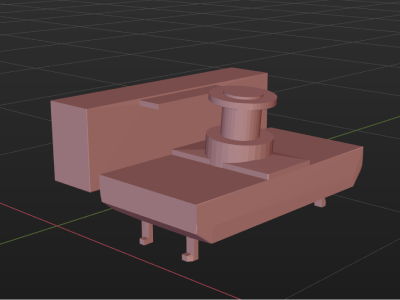
例 3:
ビュー 編集前 編集後 カスタマイズビュー
正面図
側面図