Viz ティーチングによりロボットを接続
ソフトウェアのメインインターフェイスで、ツールバーの「Viz ティーチングによりロボットを接続」をクリックします。
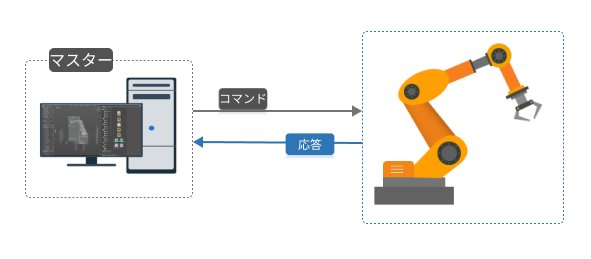
Viz ティーチングとは、Mech-Viz によってロボットを制御することです。Mech-Viz をマスターとしてロボットにコマンドを送信し、ロボットがスレーブとして受信しコマンドを実行します。
以下のように Viz ティーチングによりロボットを接続します。
-
今のプロジェクトに選択したロボットモデル型番とロボット実機の型番が一致していることを確認します。ロボットモデル型番は、リソースパネルで確認できます。
-
Viz ティーチング通信 を参照してプログラムをロードし、Viz ティーチング通信設定を完了します。
-
ロボット側で Viz との通信プログラムを起動します。
-
ツールバーの Vizティーチングによりロボットを接続 をクリックします。
-
ロボットの IP アドレスを入力します。
-
ロボットを接続をクリックします。
-
接続を確認します。
接続済みと表示されれば正常に接続しました。ロボットを同期させるをクリックします。すると仮想ロボットとロボット実機の位置姿勢が同期します。
正常にロボットを接続できない場合、以下のようにトラブルシューティングを行ってください。
-
今のプロジェクトに選択したロボットモデル型番とロボット実機の型番が一致していることを確認します。
-
ロボット IP アドレスが正確かを確認します。
-
ロボット側のプログラムを正常にロードしたかを確認します。
-