自動適応相対移動
使用シーン
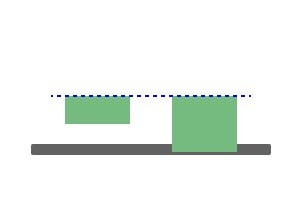
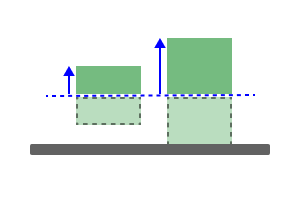
「相対移動」ステップの持ち上げ高さは一定ですが、「自動適応相対移動」は箱の高さに応じて持ち上げ高さを自動的に調整します。箱の高さは、Mech-Vision から出力されたビジョン処理の結果から取得します。

パラメータ説明
移動ステップの共通パラメータ
移動目標点を送信
デフォルトではチェックが入っています。相手側(ロボットなど)に現在の位置姿勢を送信します。チェックを外すと、現在の経路点を送信しませんが、計画する経路に残ります。
移動コマンドの後の非移動コマンドをスムーズに実行することを試行
デフォルトではチェックが外れており、 移動ステップ の間にビジョン処理による認識、DO を設定、DI をチェックなどの非移動ステップを接続すると、経路点の送信を中断し、ロボット実機動作中に一時中止することがあります。
チェックを入れると現在のステップ実行が完了しなくても続行することが可能です。これにより、ロボットがよりスムーズに動作します。ただし、ステップが途中で終了する可能性があります。
ステップが途中で終了する原因は?
Mech-Viz 実行中、ロボットに同時に複数の経路点を送信しますが、最後の経路点が現在のロボットの関節角度と一致しているかのみを判断します。一致していると判断したら、ロボットが最後の経路点に到着していると見なします。
例えば、10 の移動ステップがある経路では、移動ステップ 5 の位置姿勢は最後のステップの位置姿勢とは同じとします。ロボット移動速度が遅くいと、5つ目の経路点に到着した後現在の関節角度を Mech-Viz に送信します。5つ目の移動ステップは最後の移動ステップとは、位置姿勢が同じなので Mech-Viz はロボットが全ての経路点に移動したと判断してコマンド実行が途中で終了する可能性があります。
配置された対象物との衝突を検出しない
衝突検出パネルの対象物衝突検出を有効にした場合、このオプションをチェックするとロボットとロボットハンド、配置済み対象物の衝突を検出しません。衝突の誤検出を回避するために、把持/配置が配置に設定されたステップの後に続く移動ステップではこのステップをチェックします。
例
吸盤の TCP は吸盤の表面ではなく、モデル内部にあるのは一般的です。箱を把持する時に、吸盤のモデルと箱モデルとは重なり合うことになります。しかし、ソフトウェアはロボットハンドと把持済み対象物との衝突を検出しないので把持しているときに衝突発生のメッセージは出てきません。箱を配置した後、その箱のモデルはシーンのモデルになり、ロボットハンドと箱のモデル(シーンのモデルとして)の衝突を検出してメッセージを表示します。この場合、タスクを完了できません。
これをチェックするとロボットやロボットハンドと配置済み対象物モデルとの衝突を検出しないので上記の問題を解決できます。
点群との衝突検出モード
普通は自動を選択すればいいです。このモードでは、衝突検出パネルの点群衝突検出の設定内容を使用します。ロボットが把持してから配置するまでの移動ステップに対しては、検出を選択します。
自動 |
初期値。衝突モデルパネルの点群衝突検出をオンにすると、 「ビジョン処理による移動」ステップと「ビジョン処理による移動」に依存する「相対移動」ステップにだけ点群衝突検出を実行し、その他の移動ステップには実行しない |
検出しない |
ステップの点群衝突をいずれも検出しない |
検出 |
ステップの点群衝突を全部検出する |
対象物の対称性を使用しない
このパラメータは、移動ステップの目標点タイプが対象物位置姿勢に設定された場合にのみ使用できます。
この対称性は、ワークライブラリで衝突モデルを設定する時に事前に設定した把持されている対象物の回転対称性です。
無し |
初期値。対称性を無効にしない |
Z軸 |
Z 軸を中心とする対称性だけを無視しない |
XY軸 |
XY 軸を中心とする対称性だけを無視しない |
全て |
物体の対称性を使用しないように設定すると、ロボットが物体の位置姿勢に正確に到達して対象物を配置しない |
| 移動ステップをワーク配置に使用するとき、回転対称性を使用するとワーク配置位置の一致性を保証できません。ワークの配置姿勢を指定したい場合に全てのワーク対称性を無視してください。 |
計画が失敗した時の出口
チェックすると、計画に失敗出口が追加されます。
現在のステップの経路計画が成功すると、ワークフローは成功出口から実行します。失敗すると、ワークフローは計画のに失敗出口から実行します。複数の計画失敗出口がある移動ステップがあるワークフローは、最初の移動ステップの計画失敗出口から実行します。
把持された対象物との衝突検出モード
設定する前に、衝突検出パネルで対象物衝突検出を有効にしてください。
| 衝突検出を有効にしなければ衝突のリスクが高まるので注意が必要です。 |
シーンの物体との衝突を検出しない
チェックすると把持済み対象物とシーンの物体との衝突を検出せず、衝突検出のための計算が削減され、経路計画の速度が向上します。
ロボットとの衝突を検出しない
チェックすると把持済み対象物とロボットとの衝突を検出せず、衝突検出のための計算が削減され、経路計画の速度が向上します。
点群との衝突を検出しない
衝突検出パネルで点群衝突検出を有効にしたままこのオプションをチェックすると、把持済み対象物と点群との衝突を検出せず、衝突検出のための計算が削減され、経路計画の速度が向上します。
基本的な移動設定
運動タイプ
関節運動 |
ロボットが円弧に沿って走行します。スムーズに走行できるので特異点を回避することが可能。
|
直線運動 |
ロボットが直線に沿って走行します。
|
特異点回避
運動タイプが直線運動の場合、特異点回避機能を有効にすると複数のロボット関節が直線に沿って移動するようになり、特異点を回避できます。
詳細説明
| 移動区間数の制限 | 固定 | 制限なし |
|---|---|---|
機能 |
ユーザー指定の区間数に従って直線に沿って移動します。 |
移動する区間数を自動的に計算します。 |
アドバンテージ |
|
|
ディスアドバンテージ |
|
|
| パラメータ | 説明 |
|---|---|
移動区間数 |
移動区間数の制限を固定に設定すると、ユーザーが関節運動の区間数を指定することになります。 |
位置偏差の上限 |
直線運動の経路から外れる距離の最大許容値。 位置偏差の上限の値が高いほど特異点回避の成功率は高くなり、実際の移動経路は直線から外れるようになります。 |
角度偏差の上限 |
直線運動の経路から外れる角度の最大許容値。 角度偏差の上限の値が高いほど特異点回避の成功率は高くなり、実際の移動経路は直線から外れるようになります。 |
速度&加速度
速度&加速度は、ロボット動作のスピードを決定します。普通、加速度の値を速度より小さく設定します。加速度の値を速度よりも大きくしたらロボット動作がスムーズでなくなります。
| ロボットが安定に把持を実行するように、ビジョン処理による移動ステップとその前後のステップの運動速度を低く設定してください。 |
ブレンド半径
調整説明:通常、初期値を使用すればいいです。
-
レンド半径とは、回転する位置が目標点までの距離であり、大きいほどロボットの動きはスムーズになります。ロボットが狭いスペースで動作する場合、ブレンド半径を大きく設定する必要はありません。
-
ロボットがより広いスペースで動作し、障害物がなくて 2つの経路の間に距離が遠い場合、ロボットがスムーズに動くように、ブレンド半径を大きく設定することができます。
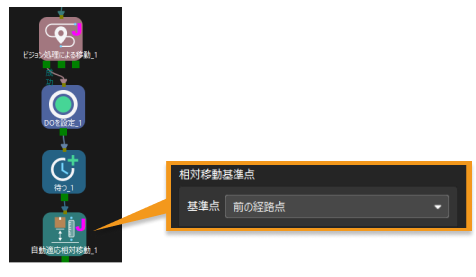
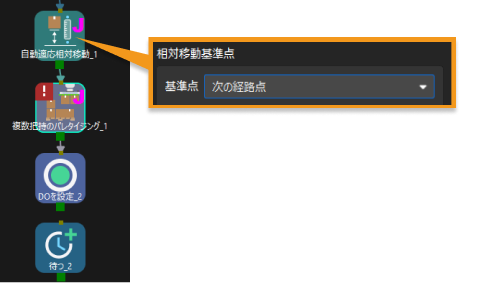
基準点
自動適応相対移動するの基準位置。ソフトウェアは、基準点を開始位置としてオフセット量を計算してこのステップの目標位置を取得します。
前の経路点は把持の後に使用する |
次の経路点は配置の後に使用する |
|
|
相対移動オフセット量
移動オフセット量はオフセット方向と固定オフセット量を指定する必要があります。
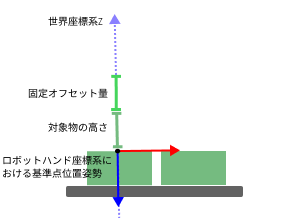
このステップを使用すると、基準点におけるロボットハンド座標系 Z 方向または世界座標系 Z 方向に沿うオフセットを設定することができます。
|
世界座標系と基準点におけるロボットハンド座標系のイメージ図(把持点を基準とする場合) 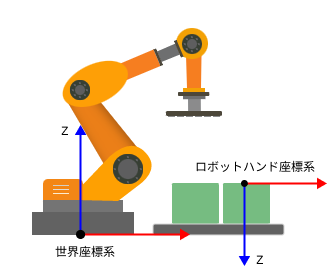
|
-
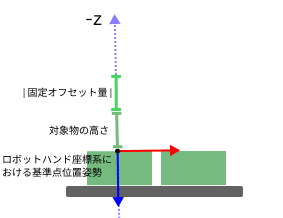
基準点におけるロボットハンド座標系 Z 方向に沿ってオフセット量を設定:
基準点におけるロボットハンド座標系 Z 方向に沿ってオフセット量=固定オフセット量-箱 Z 方向高さ。
基準点におけるロボットハンド座標系 Z 方向は下向きなので、固定オフセット量を負の値に設定することをお勧めします。するとロボットハンド座標系の-Z 方向に沿ってオフセットします:|固定オフセット量| + 箱 Z 方向高さ。
-
世界座標系 Z 方向に沿ってオフセット量を設定:
世界座標系 Z 方向に沿ってオフセット量=固定オフセット量 + 箱 Z 方向高さ。
世界座標系 Z 方向は上向きなので、固定オフセット量を正の値に設定することをお勧めします。すると世界座標系のZ 方向に沿ってオフセットします:固定オフセット量 + 箱 Z 方向高さ。