統計データで位置姿勢の繰返し精度をチェック
機能
ビジョンプロジェクトの位置姿勢の安定性を検証できます。
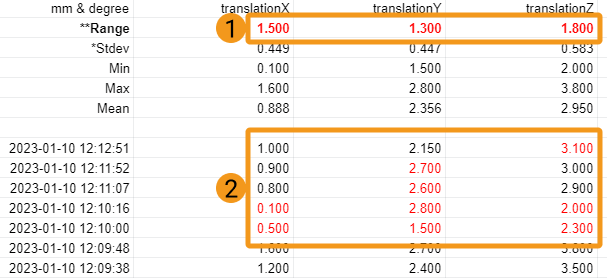
同じワークを異なる位置で10~20回撮影することで、ワークがプロジェクトで出力する位置姿勢データ(最小値、最大値、平均値、範囲、標準偏差)を統計し、位置姿勢やそのほかのデータの安定性を判断します。
|
Eye-In-Hand、Eye-To-Handのどちらにカメラを設置しても、異なる位置でのワークの位置姿勢の安定性を確認する必要があります。異なる位置でワークを10~20回撮影する際に、ワークとカメラとの相対位置は固定されています。
|
使用シーン
カメラの安定性をチェックしたり、ビジョンプロジェクトのパラメータ調整の有効性を検証するために使用されます。
3D位置姿勢推定に関連するステップの後につなぎ、モデルマッチングによって得られた位置姿勢の安定性を統計できます。また、出力 ステップの前につなぎ、ワークの位置が変わらないようにしてから、カメラがワークの画像を取得して位置決めの安定性と認識誤差を検証することも多いです。
プロジェクトを実行後、このステップはExcel形式の「統計データファイル」を指定したパスに出力します。このファイルでは、位置姿勢のX、Y、Z値とオイラー角のX、Y、Z値の統計結果を確認できます。
パラメータ説明
統計するデータ
- 入力のデータ型
-
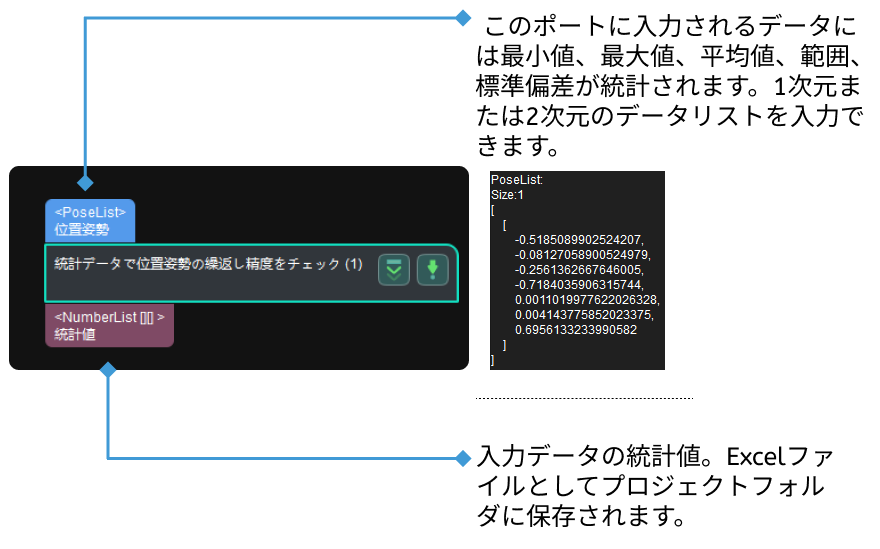
パラメータ説明:ステップに入力するデータ型を選択するために使用されます。異なる入力データ型は、異なる入力ポートに対応します。
オプション:PoseListInput、NumberListInput
-
PoseListInput:一つの位置姿勢のリスト、または複数の位置姿勢のリストを入力します。
-
NumberListInput:その他の種類のデータを入力します。
初期値:PoseListInput
調整アドバイス:実際の状況に応じて設定してください。調整効果を 調整の例 に示します。
-
- 出力のデータ型
-
パラメータ説明:このパラメータは、異なる入力データ型を選択した後に出力されるデータ型を示します。
初期値:空間位置とオイラー角の統計値。
調整説明:調整する必要はありません。
- 位置姿勢座標偏差の許容範囲(0-1000)
-
パラメータ説明:入力した位置姿勢の位置座標の偏差の上限値(ミリメートル単位)を設定するために使用されます。値を入力した後、最大値と最小値との差はこのしきい値を超えた場合、このステップでは 異常値処理 パラメータの設定に従ってエラーを報告します。このチェックは、X、Y、Zの値について別々に行われます。
値の範囲:0-1000
初期値:1.0mm
調整説明:実際のニーズに応じて設定してください。調整効果を 調整の例 に示します。
- オイラー角の偏差の許容範囲(0-360)
-
パラメータ説明:入力した位置姿勢のオイラー角の座標の偏差の上限値(単位は度)を設定するために使用されます。値を入力した後、最大値と最小値との差はこのしきい値を超えた場合、このステップでは 異常値処理 パラメータの設定に従ってエラーを報告します。このチェックは、α、β、γの値について別々に行われます。
値の範囲:0-360
初期値:0.100°
調整説明:実際のニーズに応じて設定してください。調整効果を 調整の例 に示します。
統計情報の保存
- 再開始
-
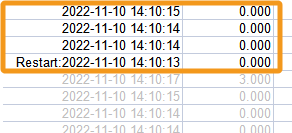
パラメータ説明:データを統計する際にワーク位置が変化した場合や、異常なデータが混入した場合に、このパラメータはデータを再統計するかどうかを決定するために使用されます。チェックを入れると、出力データに「Restart」がマークされます。また、「Restart」マーカーのタイムスタンプより前のデータが統計範囲に含まれず、グレー表示されます。
初期値:チェックを入れない。
調整説明:データを再統計する必要がある場合、このパラメータにチェックを入れてください。調整効果を 調整の例 に示します。
-
実行が1回成功すると、このパラメータチェックが外れている状態にリセットされます。
-
このパラメータにチェックを外すと、保存された統計情報に異常データが常に表示されます。
-
- 異常値処理
-
パラメータ説明:このパラメータは、統計データに異常値がある場合に異常値の処理方式を選択するために使用されます。
オプション:異常値を発見したら即エラー報告、異常値を記録してマーク。
-
異常値を発見したら即エラー報告:異常値を発見した直後にエラーのみを報告し(エラー報告には以下の3種類がある)、異常データはファイルに書き込まれません。
-
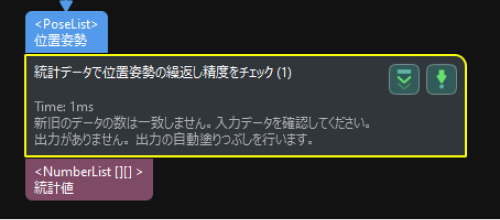
以前の数と現在の数の不一致によるエラー。これは、データをアンパック ステップを使用して解決することが可能です。
-
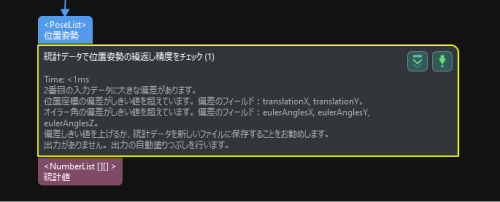
位置座標の偏差とオイラー角の偏差がしきい値を超えた場合に報告するエラー。これは、位置姿勢座標偏差の許容範囲、オイラー角の偏差の許容範囲 を調整して解決することが可能です。
-
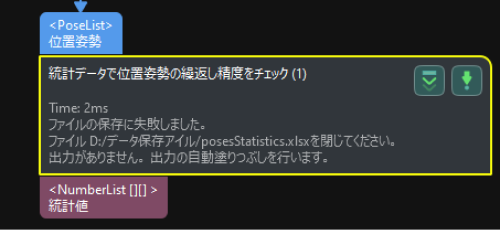
統計データの保存ファイルを開いてデータを保存できないために報告するエラー。これは、統計データの保存ファイルを閉じてからプロジェクトを再実行することで解決できます。
-
-
異常値を記録してマーク:異常値を発見しても、エラーは報告されません。異常データはファイルに書き込まれて統計に関与され、赤で表示されます。
初期値:異常値を発見したら即エラー報告。
調整説明:実際のニーズに応じて設定してください。調整効果を 調整の例 に示します。
-
- 小数点以下の桁数(0-8)
-
パラメータ説明:このパラメータは、統計データの小数点以下の桁数を設定するために使用されます。例えば、このパラメータを「2」に設定すると、このステップでは計算後の統計値を四捨五入して小数点以下2桁まで表示します。
初期値:3
値の範囲:0-8
調整説明:実際のニーズに応じて設定してください。
- 正負値で範囲を表示
-
パラメータ説明:チェックを入れると、統計データファイルで範囲が正負値で表示されます。例えば、チェックを入れる前は範囲が200の場合、チェックを入れた後は範囲が±100として表示されます。
初期値:チェックを入れない
調整説明:実際のニーズに応じて設定してください。
- ファイルベース名
-
パラメータ説明:このパラメータは、保存された統計データファイルの名前を設定するために使用されます。設定しない場合、統計データファイルの名前は「posesStatistics」になります。ファイルのベース名が変更された場合、この場合で自動的に 再開始 にチェックが入り、統計が再開されます。
初期値:なし。
調整説明:実際のニーズに応じて設定してください。
ワーク位置が変化した場合や、異常なデータが混入した場合、このステップの 再開始 パラメータにチェックを入れたら、ファイルベース名 を設定して、データ保存ファイルを再作成してデータを収集することが可能です。
- 保存ディレクトリ
-
パラメータ説明:このパラメータは、統計データファイルの保存ディレクトリを設定するために使用されます。設定しない場合、統計データファイルはプロジェクトフォルダに保存されます。
初期値:なし。
調整説明:右側にある
 をクリックして保存ディレクトリを選択できます。
をクリックして保存ディレクトリを選択できます。