メッセージによって異なる分岐を実行
機能
外部コマンドを待ち、かつ受信したコマンドに従って異なる分岐を実行します。
| このステップに、実行するコマンドを保存します。例えば、0 を受信してまだそれを実行していない内に 1 をまた受信するとします。ステップが実行される時は、まず 0 を処理します。その次の実行では 1 を処理します。また、実行後、このステップに保存されたコマンドは全部クリアされます。 |
パラメータ説明
シミュレート時実行内容
シミュレート時にステップ動作を選択するために使用します。
-
外部入力を確認する
シミュレーションにこのステップを実行した時、本当の外部入力を確認し、かつその入力に応じて出口を選択します。
-
特定の出口から実行する
特定の出口を指定し、シミュレーションにこの出口の後続ワークフローを実行します。
-
出口を手動で指定する
このステップを実行する時に出口選択のウィンドウが表示されます。出口を指定してから続けて実行します。
下図を例とします。
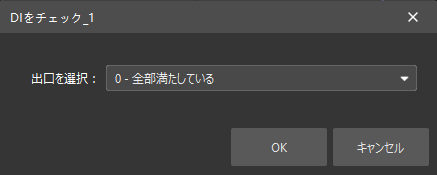
「出口を選択:」クリックメニューから出口を指定し、確認ボタンをクリックするとプロジェクトは続けて実行します。
キャンセルまたは X をクリックしてシミュレーションを停止します。
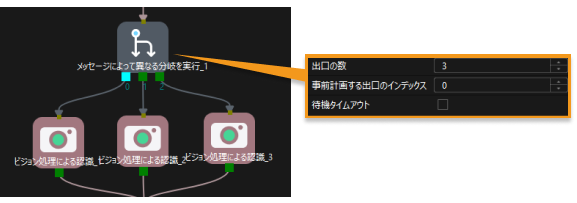
出口の数
このステップの出口の数を指定します。
-
プロジェクトの実行を中断し、外部コマンドを受信してからまた実行する時、出口の数を 1 に設定します。すると外部コマンドを受信してから続けて実行します。
-
外部コマンドによって異なる分岐を実行する時、出口の数を 1 以上に設定します。実際に応じて数を指定してください。
設定できるパラメータは指定した数によって異なります。詳しくは以下の説明をお読みください。
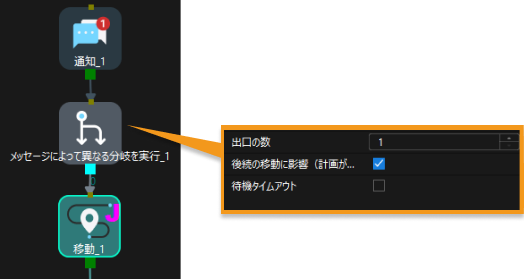
出口の数 = 1
出口の数 を 1 に設定した時、以下のパラメータを設定できます。
実行を中断します。外部コマンドを受信してから続けて実行します。
後続の移動に影響(計画が中断される)
デフォルトでは計画を中断します。つまりこのステップまで計画し、ここまで実行してから後のワークフローを計画します。
| 計画:ソフトウェアは衝突が発生しない、かつスムーズに目標位置に到達するロボット移動経路を計算する過程。 |
出口の数 > 1
出口の数 を 1 以上に設定した時、以下のパラメータを設定できます。
外部コマンドに従って異なる分岐を実行するために使用します。
| 出口の数が 5つ以上ある時、複数の出口は統合して表示されます。Ctrl を押したままステップのアイコンをダブルクリックして全ての出口を表示します。各出口の番号と接続されているステップはパラメータパネルの下部にある表に表示されます。 |
事前計画する出口のインデックス
計画がスムーズに実行できるように、事前計画する出口を指定します。実行する可能性が最も高い分岐を指定します。これにより、再度計画の確率を下げてロボットの待機時間を低減します。
出口の数以外の数字(-1など)に設定すると、事前計画する出口を指定しません。