ロボットハンドの自動切り替え
サンプルプログラムの概要
このサンプルプロジェクトは、バラ積みの小型板金部品のピッキングでロボットハンドの自動切り替えを実現する方法を示します。ビジョンシステムによりロボットをガイドして、把持点に合わせて適切なロボット半に切り替えます。これで効率の向上を実現します。
使用する例は以下のようです。
適用シーン
-
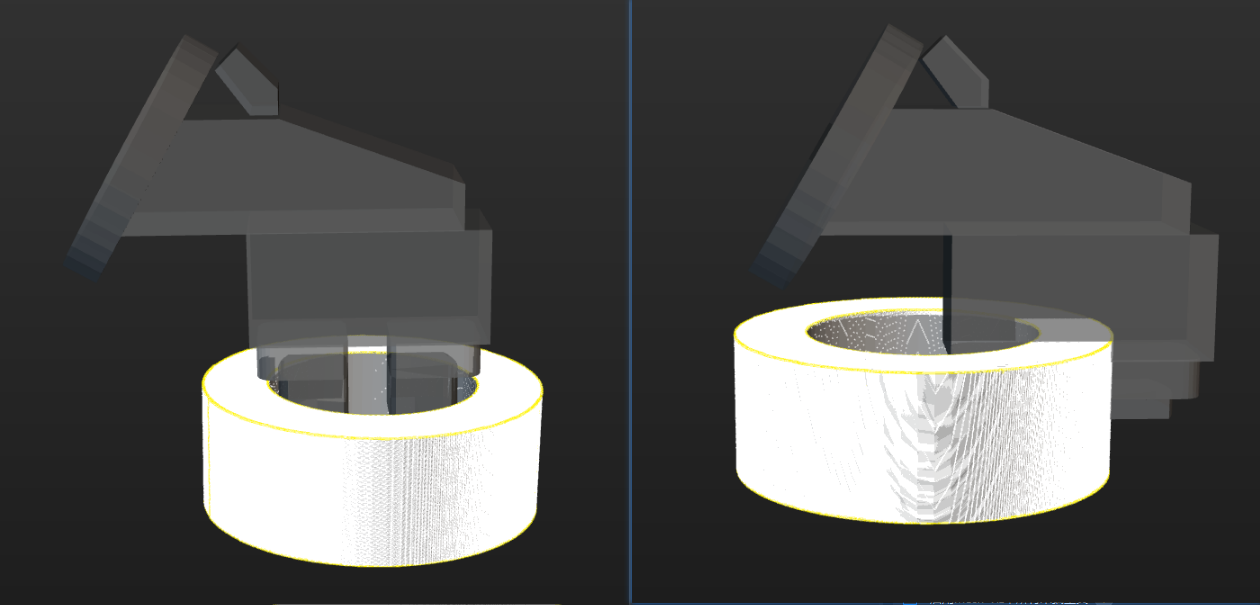
同じロボットハンドを異なる状態でワークのピッキングに対応する必要があるシーンに使用します。リング状ワークを把持する場合、内径把持と外径把持を計画できます。
-
クイックチェンジャーを使用してロボットハンドを変更する必要がる現場に使用できません。
| このサンプルプロジェクトは、同じロボットハンドを異なる状態でワークをピックアップする効果を示します。 |
使用前提
-
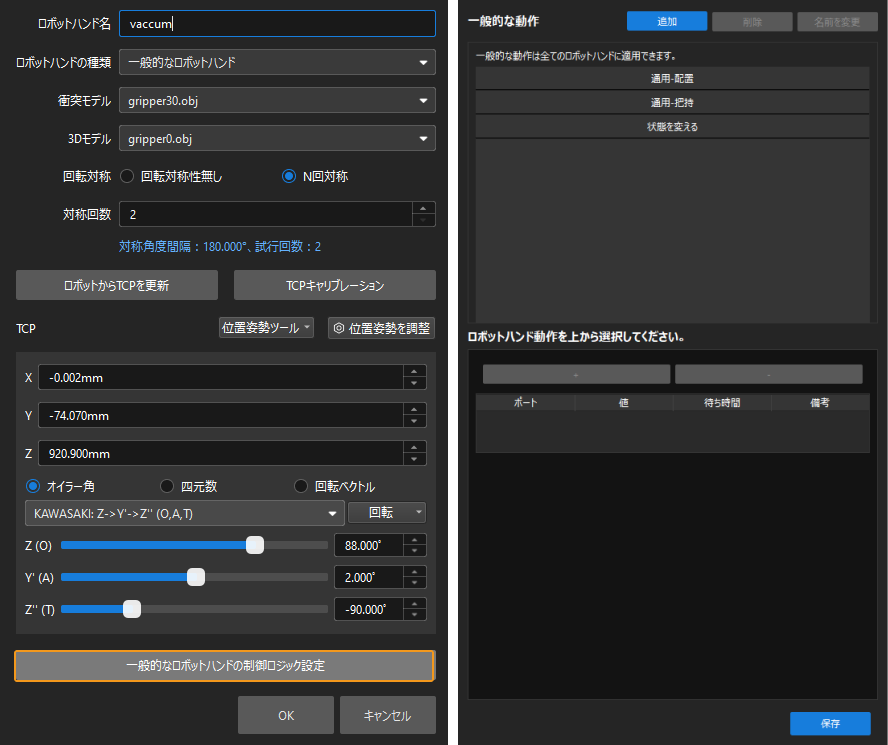
Viz ティーチング通信の場合、リソースツリーでロボットハンドを設定します。
-
リソースツリーの ロボットハンド の右側にある
 をクリックし、ロボットハンド設定ウィンドウを開きます。
をクリックし、ロボットハンド設定ウィンドウを開きます。 -
下部の一般的なロボットハンドの制御ロジック設定をクリックして設定を完了します。
-
一般的な動作にロボットハンドが通用する動作名を追加します。
-
異なるロボットハンドの動作に個別に DO 信号を設定します。
-
-
-
ワークライブラリで把持点とロボットハンドの対応関係を設定します。
把持点を設定する時、ロボットハンドリストで使用したいロボットハンドを選択し、ワークライブラリでロボットハンドと把持点の対応関係を確認することができます。 
-
標準インターフェースまたは Adapter(アダプター) 通信の場合、ロボットプログラミングを書く必要があります。このサンプルプロジェクトに使用可能なサンプルプログラムは、ソフトウェアインストールパス
Communication Component/Robot_Interface/FANUC/sample/MM_S7_Viz_SwitchTCPからダウンロードできます。
ワークフローの構築
-
インターフェースまたは Adapter(アダプター) 通信の場合、ロボットハンドを切り替えステップは以下のように配置します。

-
Viz ティーチング通信の場合、以下のようにワークフローを構築してください。インターフェースまたは Adapter(アダプター) 通信のワークフローに比べると、ロボットハンド動作を実行が追加されています。
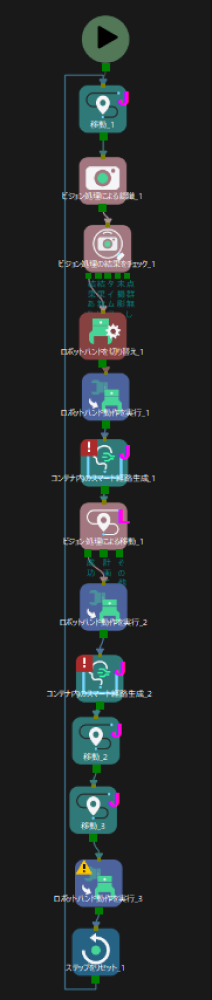
重要なステップとそれらの機能を以下の表で説明します。
番号 ステップ 機能 1
適切なロボット半のに自動的に切り替える
2
ロボットハンドを初期の把持状態に調整する
3
ロボットハンドに把持の動作を実行させる
4
ロボットハンドに配置の動作を実行させる
パラメータ調整の説明
-
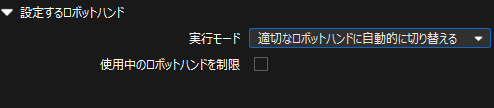
ロボットハンドを切り替えステップ
ステップのパラメータ実行モードを適切なロボットハンドに自動的に切り替えるに設定し、必要に応じて使用中のロボットハンドを制限をオンにします。オンにしないと、ワークライブラリにある有効にされたロボットハンドを全部試行して適切なロボットハンドに切り替えます。
-
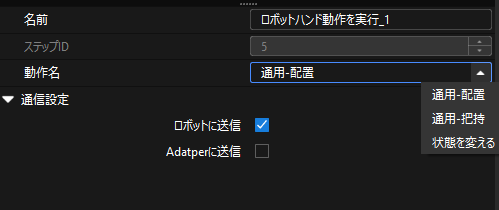
ロボットハンド動作を実行ステップ
Viz ティーチング通信の場合にのみ使用できます。 動作名のクリックメニューから必要な動作を選択します。Viz ティーチング通信の場合にロボットに送信を選択します。
注意事項
このサンプルプロジェクトを現場に使用する時、以下の注意事項を参考にしてプロジェクトを修正・設定することができます。
-
ビジョン処理の記録を無効にして、ビジョン処理による認識ステップを使用して対応する Mech-Vision プロジェクトを呼び出してビジョン処理の結果を取得してください。
-
衝突検出パネルでパラメータを設定してください。