吸盤コンフィギュレータ
本節では、デパレタイズ用吸盤コンフィギュレータについて説明します。
吸盤の設定は、ロボットハンドの設定に合わせて実行します。まずロボットハンド設定の説明を参考してロボットハンドを設定してください。ロボットハンド設定ウィンドウでは、ロボットハンドの種類にデパレタイズ用吸盤を選択し、デパレタイズ用吸盤設定をクリックして吸盤コンフィギュレータを開きます。
吸盤コンフィギュレータ
-
吸盤の構造を設定する
-
吸盤のブロックの数によってブロックの数パラメータ値を設定します。 複数のブロックが一つの DO 信号によって制御される場合、それらが一つのブロックと見なされ、一つの大きなブロックを作成すればいいです。
-
ブロック間の間隔によって間隔を設定します。
-
実際の吸盤のブロックのサイズによってブロックの長さ/ブロックの幅を設定します。
-
スポンジの厚さを衝突検出に使用されるスポンジの厚さ、つまり TCP 平面の下のスポンジの厚さに設定します。
-
-
ロボットハンド設定ウィンドウで設定した TCP のパラメータ値によって角度を設定します。
-
実際に応じてDO/DI 有効信号を設定します。
-
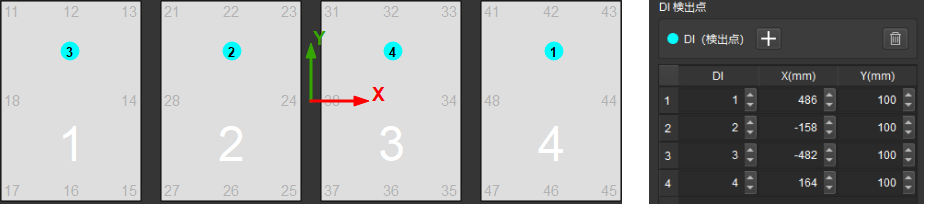
DI 検出点を設定する
-
+をクリックして DI 検出点を追加します。デフォルトでは DI が 0 となり、吸盤の真ん中にあります。
-
X と Y の値を変更するか、検出点をドラッグして検出点の位置を調整します。
-
DI の値を変更して検出点の番号を変更します。
-
検出点を削除するには、検出点を選択してから ![]() をクリックします。
をクリックします。
-
吸盤の各ブロックのポート番号によって DO の値を入力します。
-
をクリックして吸盤の設定を対応するロボットハンド設定に保存します。