衝突検出設定
デフォルトでは、ロボット、ロボットハンド、シーンの物体間の衝突を検出します。点群衝突を検出 を有効にすると、入力点群とロボットハンド間の衝突をチェックします。
-
ツールバーの 衝突設定 をクリックし、 点群衝突を検出 を有効にします。
プロジェクトの要件に応じて、以下のパラメータを設定します。
-
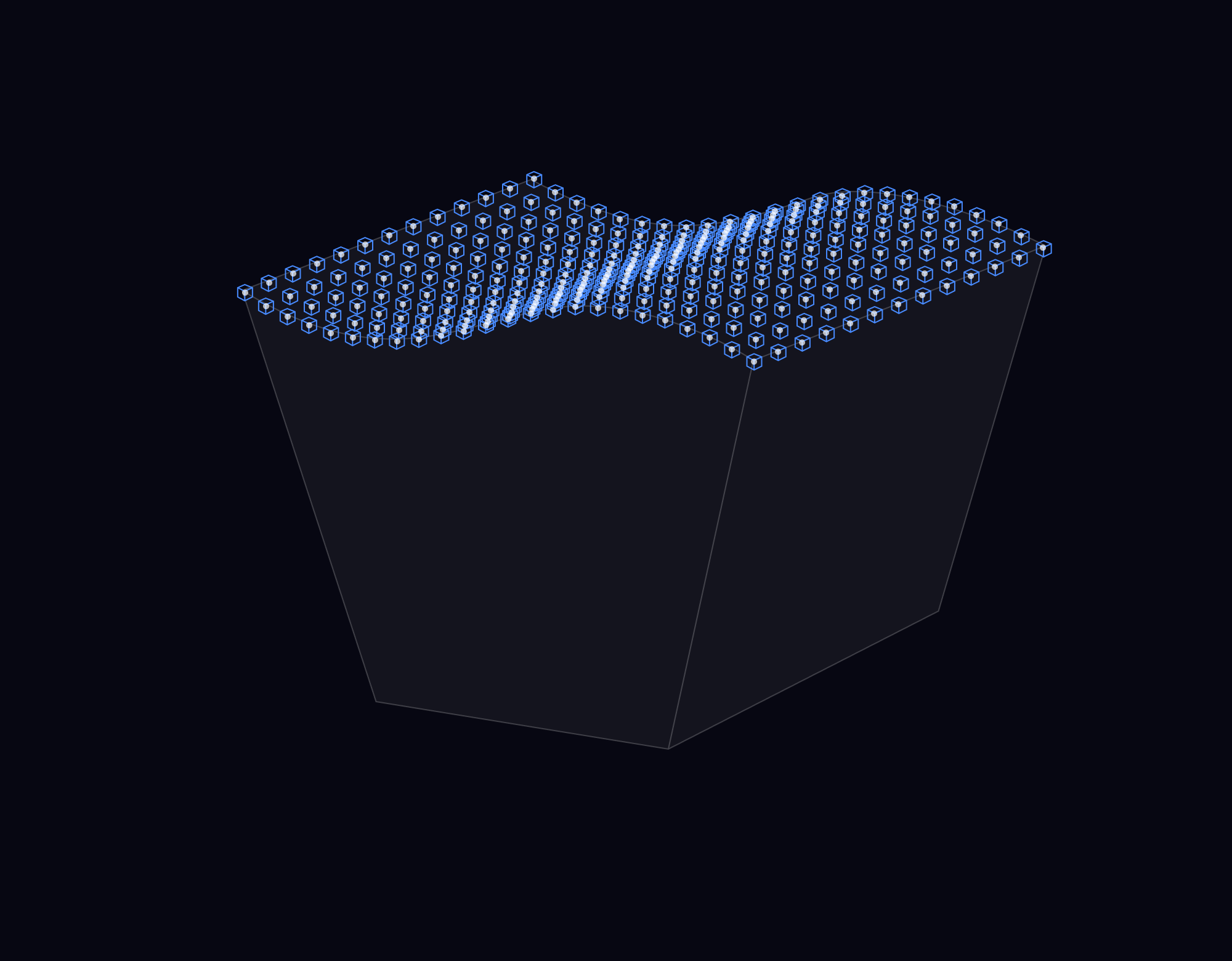
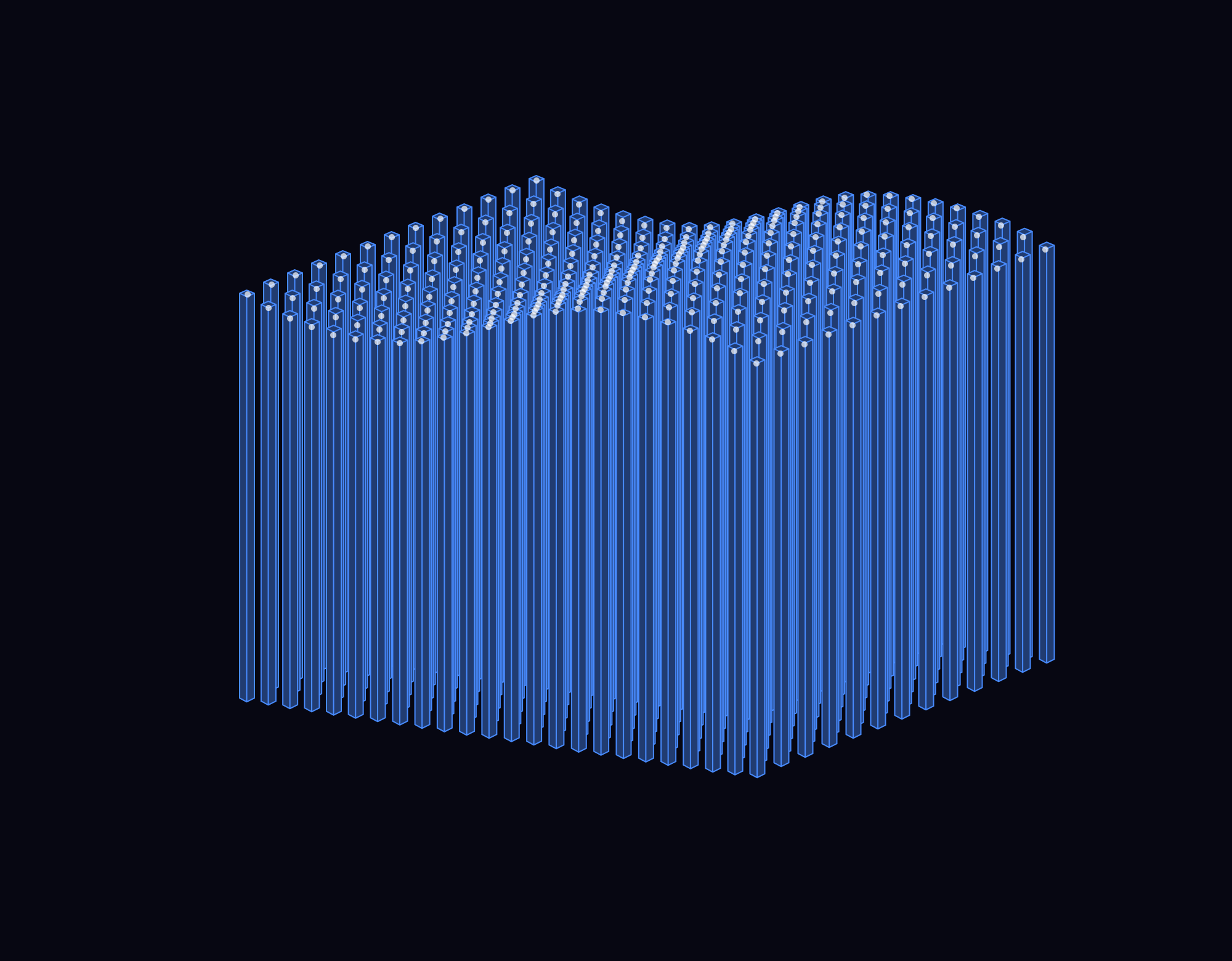
衝突検出に使用する点群の形式
点群立方体 点群柱 点群立方体で点群の表面を充填して衝突検出の計算を行う
点群柱で点群の下部を充填して衝突検出の計算を行う
-
衝突検出しきい値
ロボットハンドと点群が接している体積がしきい値を超えた場合は衝突が発生したと判定し、それ以外の場合は衝突が発生しないと判定します。
-
点群衝突記録
-
記録:計画履歴には衝突が発生した点群の位置と数が記録されます。計画履歴を確認するとき、記録された点群は仮想空間にハイライト表示されます。記録 は実行の速度に影響を与えます。
-
記録しない:計画履歴に衝突が発生した点群を確認できません。実行速度は 速い です。
-
-
-
設定後、OK をクリックします。