ディープラーニングの理解
一部のビジョン認識のプロセスでは、従来のマッチングやクラスタリングの方法が要件を満たさない場合があります。例えば、高い反射性のワークを把持する際、点群の品質が低くなり、3Dマッチング方法が正確な認識結果を出力できません。また、密集しているワークを把持する際には、クラスタリングの効果が悪く、ビジョン認識およびロボットの把持に影響を与える可能性があります。これらの状況に対処するために、ディープラーニングを併用することができます。
ディープラーニングは、機械学習の一分野であり、人工ニューラルネットワーク(ANN)を使用して複雑なタスクを自動的に学習するアプローチです。ディープラーニングは人の学習プロセスを模倣し、大量のデータをもとに自動で特徴量を抽出して学習し、関連するタスクを実行します。
Mech-Mindは、3Dビジョンシステムによるロボットの把持に適用可能なインスタンスセグメンテーションのアルゴリズムモジュールを提供しています。従来の手法では期待する結果が得られない場合、インスタンスセグメンテーション手法を認識に活用できます。以下では、各把持シーンにおけるインスタンスセグメンテーションのアルゴリズムモジュールの効果について説明します。
パレタイジング・デパレタイジング
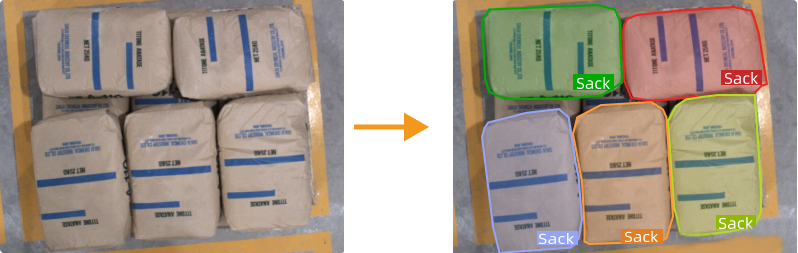
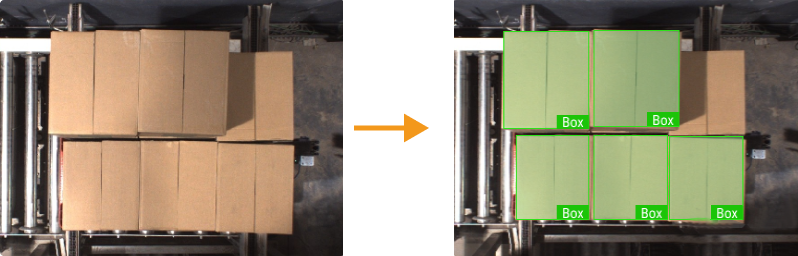
「パレタイジング・デパレタイジング」のシーンは、特定の条件に基づいて、パレットから箱、通い箱、麻袋などの対象物を降ろし、別のパレットまたは関連する機器(破袋機、コンベアなど)に配置する作業を指します。下図に示すように、インスタンスセグメンテーションのアルゴリズムモジュールは密集している段ボール箱や麻袋などを分割できます。