ロボットの繰返し精度をチェック
以下では、ロボットの繰返し精度をチェックする方法について説明します。
画像撮影位置をチェック(EIHの場合)
この機能は、EIHの場合に画像撮影位置でのロボットの繰返し精度をチェックするために使用されます。把持中にロボットが画像撮影位置に到達したときの繰返し精度が低いと、外部パラメータの精度が低下する可能性があります。
キャリブレーションボードの位置姿勢を取得するためのプロジェクトを作成
-
「カメラから画像を取得」ステップを追加します。
プロジェクトを新規作成し、「カメラから画像を取得」ステップを追加します。もしくは、現在開かれているプロジェクトでこのステップを選択し、パラメータで カメラを選択 をクリックし、カメラを選択して接続します。
-
「キャリブレーションボードの位置姿勢の計算とカメラ内部パラメータのチェック」ステップを追加します。
「キャリブレーションボードの位置姿勢の計算とカメラ内部パラメータのチェック」ステップを追加し、それを「カメラから画像を取得」ステップにつなぎます。
-
「出力」ステップを追加します。
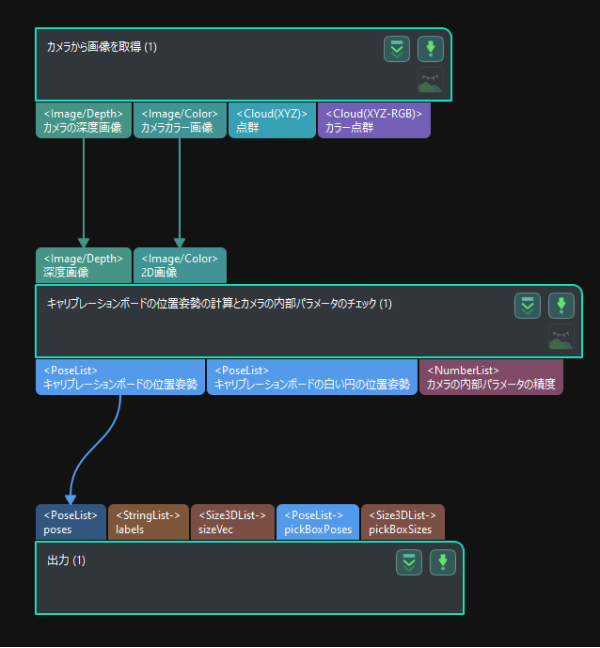
「出力」ステップを追加し、「事前定義済み(ビジョン結果)」ポートタイプを選択します。計算されたキャリブレーションボードの位置姿勢を出力するために、「キャリブレーションボードの位置姿勢の計算とカメラ内部パラメータのチェック」を「出力」ステップにつなぎます。
作成されたプロジェクトを下図に示します。
-
プロジェクトを実行して結果を確認します。
プロジェクトを実行すると、キャリブレーションボードの位置姿勢の計算結果が下のログバーに表示されます。
ロボットアームにカメラを搭載し、異なる位置からキャリブレーションボードを撮影
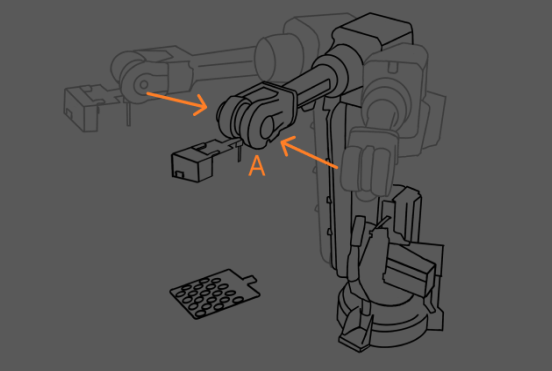
異なる位置でのキャリブレーションボードの位置姿勢を取得するために、ロボットアームにカメラを搭載し、異なる位置からキャリブレーションボードを撮影する必要があります。
-
初回の画像撮影位置をポイントAとして記録し、その位置でプロジェクトを実行し、カメラ座標系におけるキャリブレーションボードの位置姿勢を取得して記録します。
-
ティーチペンダントでロボット実機を、把持中に画像撮影位置の前後の別の位置に移動させ、移動中に並進や回転があることを推奨します。
-
ティーチペンダントでロボットをポイントAに移動させ、キャリブレーションボードの位置姿勢を取得して記録します。
-
手順2と3を繰り返し、さらにキャリブレーションボードの位置姿勢を取得し、記録します。これらの手順で取得したキャリブレーションボードの位置姿勢は、ロボットの繰返し精度をチェックするために使用されます。
固定把持位置をチェック(ETHの場合)
この機能は、ETHの場合に固定把持位置でのロボットの繰返し精度をチェックするために使用されます。ETHの場合では、ロボットは異なる経路点から固定把持位置に到達する必要があります。ロボットの繰返し精度が悪いと把持精度が低下する可能性があります。
キャリブレーションボードの位置姿勢を取得するためのプロジェクトを作成
-
「カメラから画像を取得」ステップを追加します。
プロジェクトを新規作成し、「カメラから画像を取得」ステップを追加します。もしくは、現在開かれているプロジェクトでこのステップを選択し、パラメータで カメラを選択 をクリックし、カメラを選択して接続します。
-
「キャリブレーションボードの位置姿勢の計算とカメラ内部パラメータのチェック」ステップを追加します。
「キャリブレーションボードの位置姿勢の計算とカメラ内部パラメータのチェック」ステップを追加し、それを「カメラから画像を取得」ステップにつなぎます。
-
「出力」ステップを追加します。
「出力」ステップを追加し、「事前定義済み(ビジョン結果)」ポートタイプを選択します。計算されたキャリブレーションボードの位置姿勢を出力するために、「キャリブレーションボードの位置姿勢の計算とカメラ内部パラメータのチェック」を「出力」ステップにつなぎます。
作成されたプロジェクトを下図に示します。
-
プロジェクトを実行して結果を確認します。
プロジェクトを実行すると、キャリブレーションボードの位置姿勢の計算結果が下のログバーに表示されます。
ロボット先端にキャリブレーションボードを搭載し、異なる位置から固定把持位置に移動
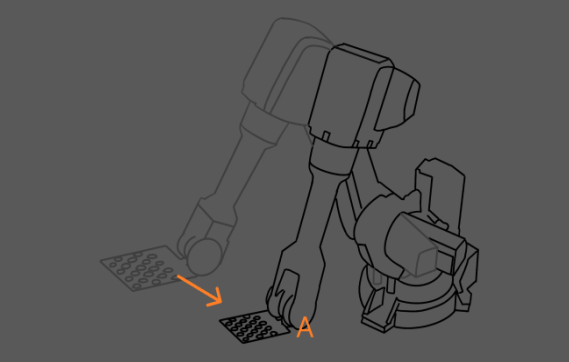
ロボットが異なる位置から固定把持位置に到達する際の精度をチェックするため、ロボット先端にキャリブレーションボードを搭載し、異なる位置から固定把持位置に移動する必要があります。
-
最初の把持位置をポイントAとして記録し、その位置でプロジェクトを実行し、カメラ座標系におけるキャリブレーションボードの位置姿勢を取得し記録します。
-
ティーチペンダントでロボット実機を、把持中に画像撮影位置の前後の別の位置に移動させ、移動中に並進や回転があることを推奨します。
-
ティーチペンダントでロボットをポイントAまで移動させ、キャリブレーションボードの位置姿勢を取得して記録します。
-
手順2と3を繰り返し、さらにキャリブレーションボードの位置姿勢を取得し、記録します。これらの手順で取得したキャリブレーションボードの位置姿勢は、ロボットの繰返し精度をチェックするために使用されます。