一般的なタイプ
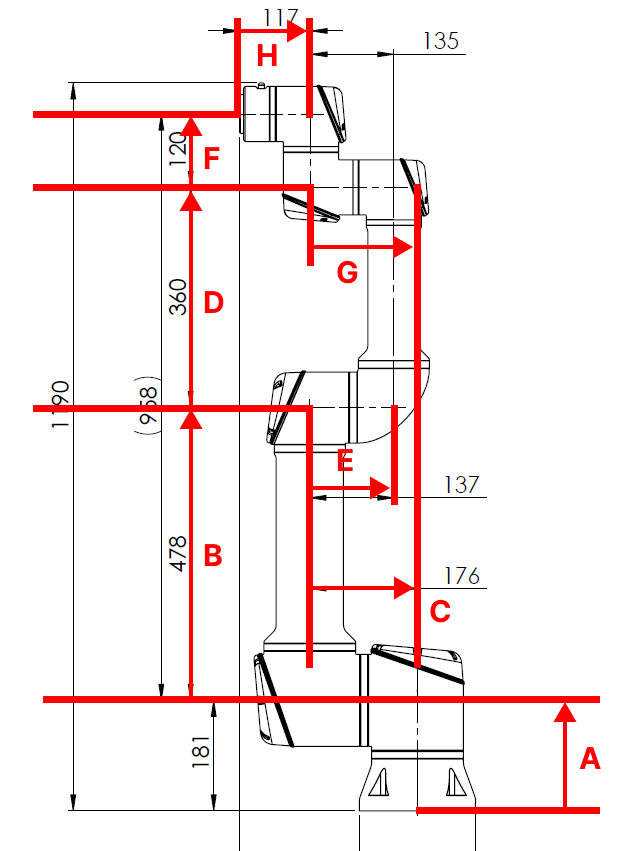
UR_UR5_Like 6 軸協働ロボット(UR5 に類似)
軸数 |
6 軸 |
構造名 |
UR_UR5_Like |
説明 |
6 軸協働ロボット(UR5 に類似) |
DH パラメータ図 |
|
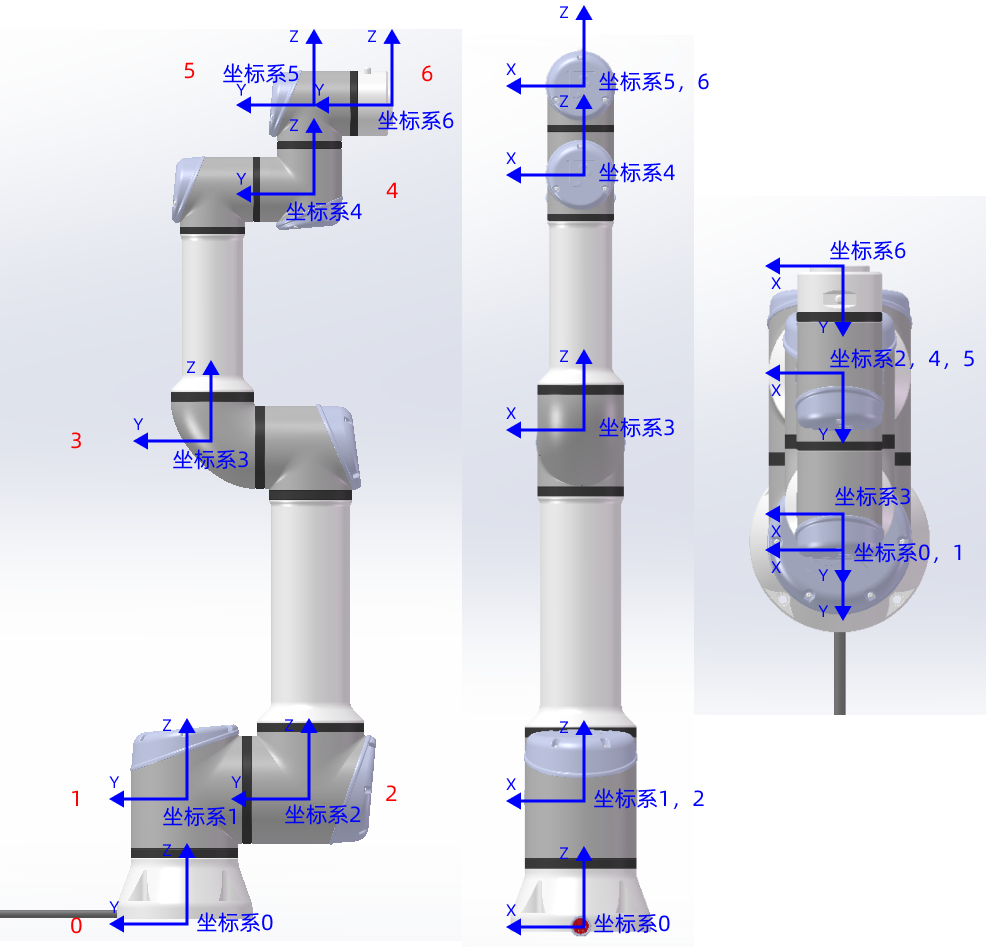
座標系 各軸名 |
|
リンク、座標系、対応関係 |
0:座標系 0 |
1:座標系 1 |
|
2:座標系 2 |
|
3:座標系 3 |
|
4:座標系 4 |
|
5:座標系 5 |
|
6:座標系 6 |
|
軸 |
手首:5、6、4 |
前腕:3 |
|
上腕:2 |
|
ベース:0、1 |
|
型番 |
UR、TM、ELITE、AUBO、JAKA、SINSUN 協働、DOBOT 協働 |
[robot]_algo の例
{
"algo_type": "UR_UR5_Like",
#DH parameters [meter]
"dh": [ A, B, D, G, F, H ],
"shoulder_offset": C,
"elbow_offset": E,
#joint limits [degree]
"min_limits": [ J1 min, J2 min, J3 min, J4 min, J5 min, J6 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max, J5 max, J6 max ],
#joint positions at standard pose [degree]
"mastering_joints": [ J1, J2, J3, J4, J5, J6 ],
#joint orientations [0/1]
"axis_flip": "J1J2J3J4J5J6",
#robot base location [meter,meter,meter,degree,degree,degree]. If robot has not been moved, robot base frame equals to World frame.
"robot_frame_in_robot_base_frame": [ x, y, z, rx, ry, rz ],
#robot flange frame orientation [x/y/z]
"flange_frame_orientation": "z"
}Painting_SixAxis 6 軸塗装ロボット
軸数 |
6 軸 |
構造名 |
Painting_SixAxis |
説明 |
6 軸塗装ロボット |
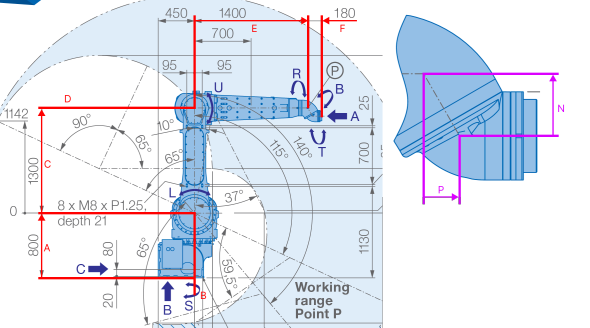
DH パラメータ図 |
|
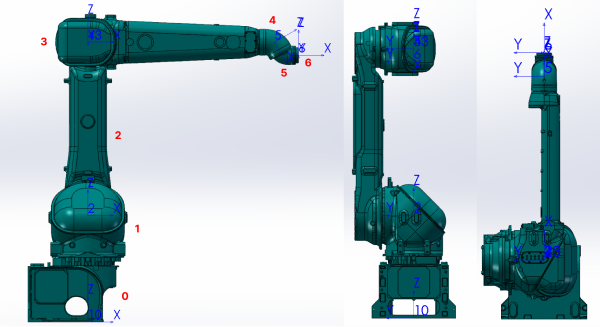
座標系 各軸名 |
|
リンク、座標系、対応関係 |
0:座標系 0、1 |
1:座標系 0、1 |
|
2:座標系 2 |
|
3:座標系 3 |
|
4:座標系 4 |
|
5:座標系 5 |
|
6:座標系 6 |
|
軸 |
手首:5、6、4 |
前腕:3 |
|
上腕:2 |
|
ベース:0、1 |
|
型番 |
Yaskawa MPX3500、EFORT GR6150 1500 |
[robot]_algo の例
{
"algo_type": "Painting_SixAxis",
#DH parameters [meter]
"dh": [ A, B, C, D, E, F, N, P ],
#joint limits [degree]
"min_limits": [ J1 min, J2 min, J3 min, J4 min, J5 min, J6 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max, J5 max, J6 max ],
"link3_dynamic_limits": [Min, Max],
#joint positions at standard pose [degree]
"mastering_joints": [ J1, J2, J3, J4, J5, J6 ],
#joint orientations [0/1]
"axis_flip": "J1J2J3J4J5J6",
#robot base location [meter,meter,meter,degree,degree,degree]. If robot has not been moved, robot base frame equals to World frame.
"robot_frame_in_robot_base_frame": [ x, y, z, rx, ry, rz ],
#robot flange frame orientation [x/y/z]
"flange_frame_orientation": "z"
}SphericalWrist_SixAxis 6 軸ロボット
軸数 |
6 軸 |
構造名 |
SphericalWrist_SixAxis |
説明 |
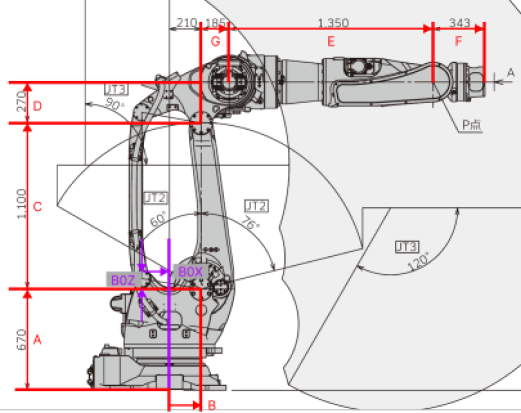
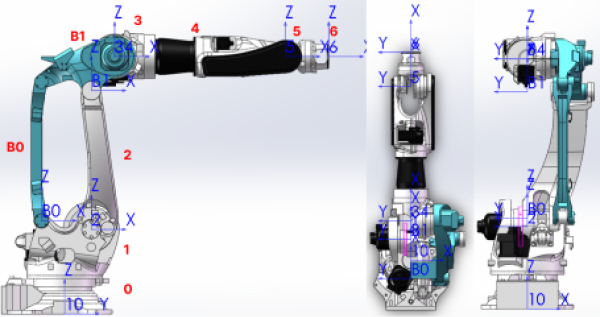
一般的な産業用 6 軸ロボット |
DH パラメータ図 |
|
座標系 各軸名 |
|
リンク、座標系、対応関係 |
0:座標系 0、1 |
1:座標系 0、1 |
|
2:座標系 2 |
|
3:座標系 3 |
|
4:座標系 4 |
|
5:座標系 5 |
|
6:座標系 6 |
|
A0: 座標系2 |
|
A1: 座標系A1 |
|
軸 |
手首:5、6 |
前腕:3、4 |
|
上腕:2、A1 |
|
ベース:0、1、A0 |
|
型番 |
Yaskawa MPX3500、EFORT GR6150 1500 Kawasaki CX110L、ABB IRB6700 150-320、FANUC R-2000iC 210F、FANUC M-900iB 700、YASKAWA GP400、Kawasaki MX シリーズ |
[robot]_algo の例
{
"algo_type": "SphericalWrist_SixAxis",
#DH parameters [meter]
"dh": [ A, B, C, D, E, F ],
"dhPassive": [ A1X, A1Z, B0X, B0Z, B2X, B2Z ],
#joint limits [degree]
"min_limits": [ J1 min, J2 min, J3 min, J4 min, J5 min, J6 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max, J5 max, J6 max ],
"link3_dynamic_limits": [Min, Max],
#joint positions at standard pose [degree]
"mastering_joints": [ J1, J2, J3, J4, J5, J6 ],
#joint orientations [0/1]
"axis_flip": "J1J2J3J4J5J6",
#robot base location [meter,meter,meter,degree,degree,degree]. If robot has not been moved, robot base frame equals to World frame.
"robot_frame_in_robot_base_frame": [ x, y, z, rx, ry, rz ],
#robot flange frame orientation [x/y/z]
"flange_frame_orientation": "z"
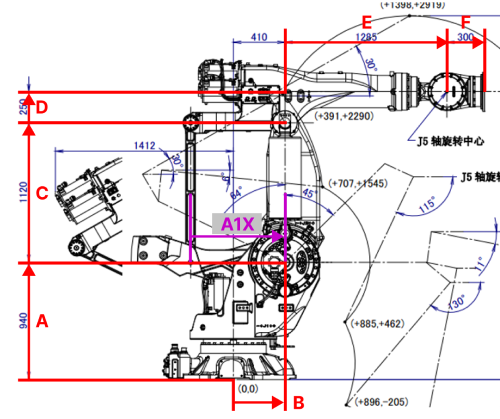
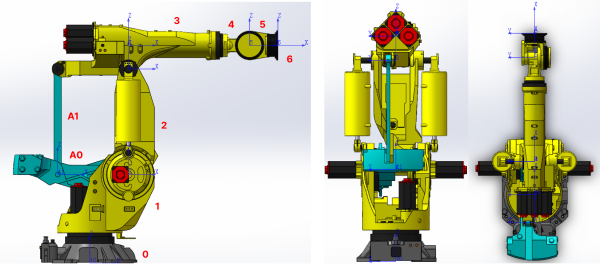
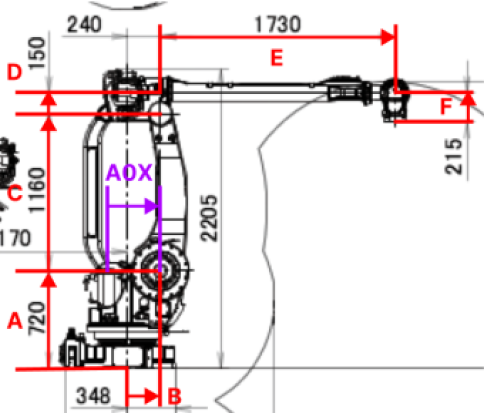
}SphericalWrist_SixAxis 6 軸ロボット+J3 が +x、+z 方向に沿ってオフセット(G、D)
軸数 |
6 軸 |
構造名 |
SphericalWrist_SixAxis_KAWASAKI_BX250L_Like |
説明 |
6 軸ロボット+J3 が +x、+z 方向に沿ってオフセット(G、D) |
DH パラメータ図 |
|
座標系 各軸名 |
|
リンク、座標系、対応関係 |
0:座標系 0、1 |
1:座標系 0、1 |
|
2:座標系 2 |
|
3:座標系 3 |
|
4:座標系 4 |
|
5:座標系 5 |
|
6:座標系 6 |
|
B0: 座標系B0 |
|
B1: 座標系B1 |
|
軸 |
手首:5、6、4 |
前腕:3 |
|
上腕:2、B0、B1 |
|
ベース:0、1 |
|
型番 |
KAWASAKI BX250L、300L、200X |
[robot]_algo の例
{
"algo_type": "SphericalWrist_SixAxis_KAWASAKI_BX250L_Like",
#DH parameters [meter]
"dh": [ A, B, C, D, G, E, F ],
"dhPassive": [ A1X, A1Z, B0X, B0Z, B2X, B2Z ],
#joint limits [degree]
"min_limits": [ J1 min, J2 min, J3 min, J4 min, J5 min, J6 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max, J5 max, J6 max ],
"link3_dynamic_limits": [Min, Max],
#joint positions at standard pose [degree]
"mastering_joints": [ J1, J2, J3, J4, J5, J6 ],
#joint orientations [0/1]
"axis_flip": "J1J2J3J4J5J6",
#robot base location [meter,meter,meter,degree,degree,degree]. If robot has not been moved, robot base frame equals to World frame.
"robot_frame_in_robot_base_frame": [ x, y, z, rx, ry, rz ],
#robot flange frame orientation [x/y/z]
"flange_frame_orientation": "z"
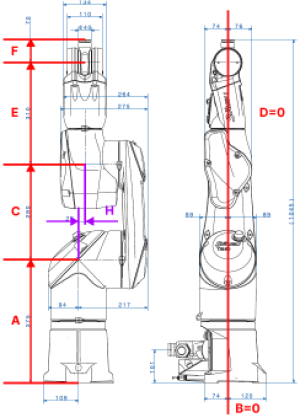
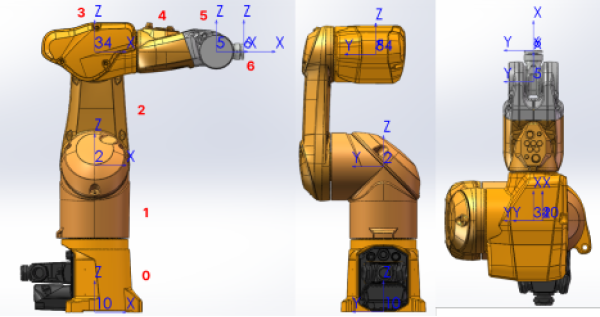
}SphericalWrist_SixAxis_STAUBLI_TX2_60_Like 6 軸ロボット+J3 が +Y 方向に沿ってオフセット(H)
軸数 |
6 軸 |
構造名 |
SphericalWrist_SixAxis_STAUBLI_TX2_60_Like |
説明 |
6 軸ロボット+J3 が +Y 方向に沿ってオフセット |
DH パラメータ図 |
|
座標系 各軸名 |
|
リンク、座標系、対応関係 |
0:座標系 0、1 |
1:座標系 0、1 |
|
2:座標系 2 |
|
3:座標系 3 |
|
4:座標系 4 |
|
5:座標系 5 |
|
6:座標系 6 |
|
軸 |
手首:5、6 |
前腕:3、4 |
|
上腕:2 |
|
ベース:0、1 |
|
型番 |
STAUBLI TX2-60 |
[robot]_algo の例
{
"algo_type": "SphericalWrist_SixAxis_STAUBLI_TX2_60_Like",
#DH parameters [meter]
"dh": [ A, B, C, D, E, F, H ],
"dhPassive": [ A1X, A1Z, B0X, B0Z, B2X, B2Z ],
#joint limits [degree]
"min_limits": [ J1 min, J2 min, J3 min, J4 min, J5 min, J6 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max, J5 max, J6 max ],
"link3_dynamic_limits": [Min, Max],
#joint positions at standard pose [degree]
"mastering_joints": [ J1, J2, J3, J4, J5, J6 ],
#joint orientations [0/1]
"axis_flip": "J1J2J3J4J5J6",
#robot base location [meter,meter,meter,degree,degree,degree]. If robot has not been moved, robot base frame equals to World frame.
"robot_frame_in_robot_base_frame": [ x, y, z, rx, ry, rz ],
#robot flange frame orientation [x/y/z]
"flange_frame_orientation": "z"
}SphericalWrist_FiveAxis 6 軸ロボット、J4 は回転不能
軸数 |
5 軸 |
構造名 |
SphericalWrist_FiveAxis |
説明 |
6 軸ロボット、J4 は回転不能 |
DH パラメータ図 |
|
座標系 各軸名 |
|
リンク、座標系、対応関係 |
0:座標系 0、1 |
1:座標系 0、1 |
|
2:座標系 2 |
|
3:座標系 3 |
|
4:座標系 4 |
|
5:座標系 5 |
|
A0: 座標系 2 |
|
A1: 座標系 A1 |
|
軸 |
手首:4、5 |
前腕:3 |
|
上腕:2、A1 |
|
ベース:0、1、A0 |
|
型番 |
YASKAWA MPL80II、FANUC M-410iB 140H |

[robot]_algo の例
{
"algo_type": "SphericalWrist_FiveAxis",
#DH parameters [meter]
"dh": [ A, B, C, D, E, F ],
"dhPassive": [ A1X, A1Z, B0X, B0Z, B2X, B2Z ],
#joint limits [degree]
"min_limits": [ J1 min, J2 min, J3 min, J4 min, J5 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max, J5 max ],
"link3_dynamic_limits": [Min, Max],
"link4_dynamic_limits": [Min, Max],
#joint positions at standard pose [degree]
"mastering_joints": [ J1, J2, J3, J4, J5 ],
#joint orientations [0/1]
"axis_flip": "J1J2J3J4J5",
#robot base location [meter,meter,meter,degree,degree,degree]. If robot has not been moved, robot base frame equals to World frame.
"robot_frame_in_robot_base_frame": [ x, y, z, rx, ry, rz ],
#robot flange frame orientation [x/y/z]
"flange_frame_orientation": "z"
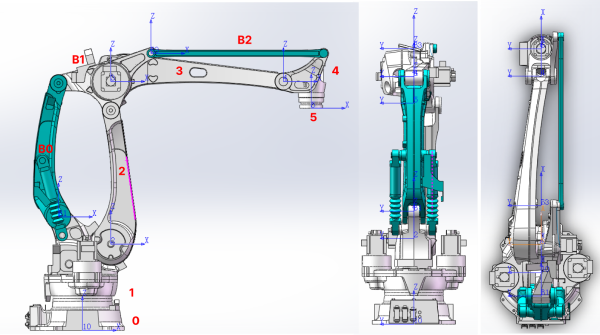
}Palletizer 4 軸パレタイズ用ロボット
軸数 |
4 軸 |
構造名 |
Palletizer |
説明 |
4 軸パレタイズ用ロボット |
DH パラメータ図 |
|
座標系 各軸名 |
|
リンク、座標系、対応関係 |
0:座標系 0、1 |
1:座標系 0、1 |
|
2:座標系 2 |
|
3:座標系 3 |
|
4:座標系 4 |
|
5:座標系 5 |
|
A0: 座標系 2 |
|
A1: 座標系 A1 |
|
B0: 座標系 B0 |
|
B1: 座標系 3 |
|
B2: 座標系 B2 |
|
軸 |
手首:4、5 |
前腕:3、B2、B1 |
|
上腕:2、A1、B0 |
|
ベース:0、1、A0 |
|
型番 |
ABB IRB660 180 315、FANUC M-410iC 110、YASKAWA MPL800II |
[robot]_algo の例
{
"algo_type": "Palletizer",
#DH parameters [meter]
"dh": [ A, B, C, E, K, F ],
"dhPassive": [ A1X, A1Z, B0X, B0Z, B2X, B2Z ],
#joint limits [degree]
"min_limits": [ J1 min, J2 min, J3 min, J4 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max ],
"link3_dynamic_limits": [Min, Max],
#joint positions at standard pose [degree]
"mastering_joints": [ J1, J2, J3, J4 ],
#joint orientations [0/1]
"axis_flip": "J1J2J3J4",
#robot base location [meter,meter,meter,degree,degree,degree]. If robot has not been moved, robot base frame equals to World frame.
"robot_frame_in_robot_base_frame": [ x, y, z, rx, ry, rz ],
#robot flange frame orientation [x/y/z]
"flange_frame_orientation": "z"
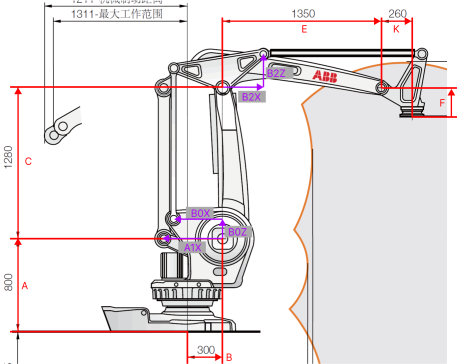
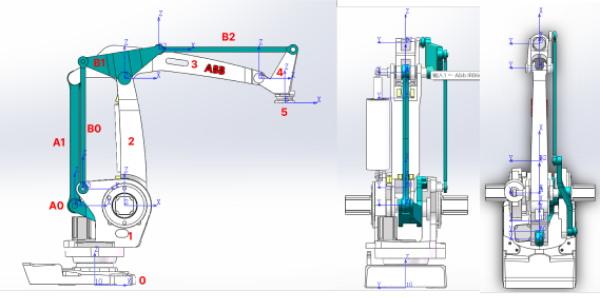
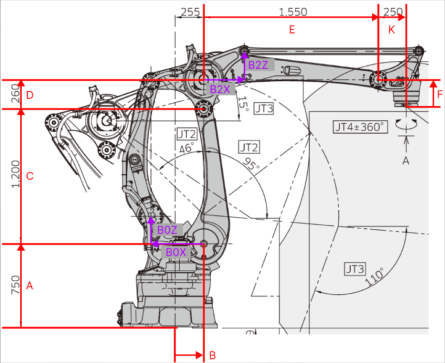
}Palletizer_KAWASAKI_CP180L_Like 4 軸パレタイズ用ロボット + J3 が +Z 方向に沿ってオフセット(D)
軸数 |
4 軸 |
構造名 |
Palletizer_KAWASAKI_CP180L_Like |
説明 |
4 軸パレタイズ用ロボット + J3 が +Z 方向に沿ってオフセット(D) |
DH パラメータ図 |
|
座標系 各軸名 |
|
リンク、座標系、対応関係 |
0:座標系 0、1 |
1:座標系 0、1 |
|
2:座標系 2 |
|
3:座標系 3 |
|
4:座標系 4 |
|
5:座標系 5 |
|
B0: 座標系 B0 |
|
B1: 座標系 3 |
|
B2: 座標系 B2 |
|
軸 |
手首:4、5 |
前腕:3、B2、B1 |
|
上腕:2、B0 |
|
ベース:0、1 |
|
型番 |
KAWASAKI CP130L、180L、300L、500L、700L、FANUC M-410iB 450 |
[robot]_algo の例
{
"algo_type": "Palletizer_KAWASAKI_CP180L_Like",
#DH parameters [meter]
"dh": [ A, B, C, D, E, K, F ],
"dhPassive": [ A1X, A1Z, B0X, B0Z, B2X, B2Z ],
#joint limits [degree]
"min_limits": [ J1 min, J2 min, J3 min, J4 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max ],
"link3_dynamic_limits": [Min, Max],
#joint positions at standard pose [degree]
"mastering_joints": [ J1, J2, J3, J4 ],
#joint orientations [0/1]
"axis_flip": "J1J2J3J4",
#robot base location [meter,meter,meter,degree,degree,degree]. If robot has not been moved, robot base frame equals to World frame.
"robot_frame_in_robot_base_frame": [ x, y, z, rx, ry, rz ],
#robot flange frame orientation [x/y/z]
"flange_frame_orientation": "z"
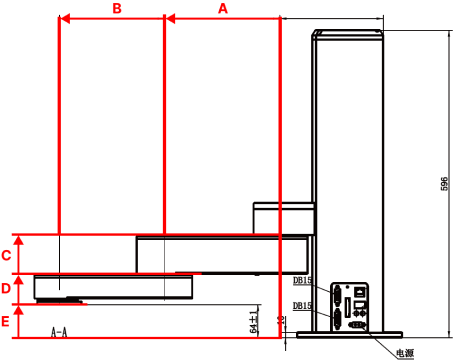
}Scara_FourAxis_Translation_1st 4 軸パレタイズ用ロボット + J3 が +Z 方向に沿ってオフセット(D)
軸数 |
4 軸 |
構造名 |
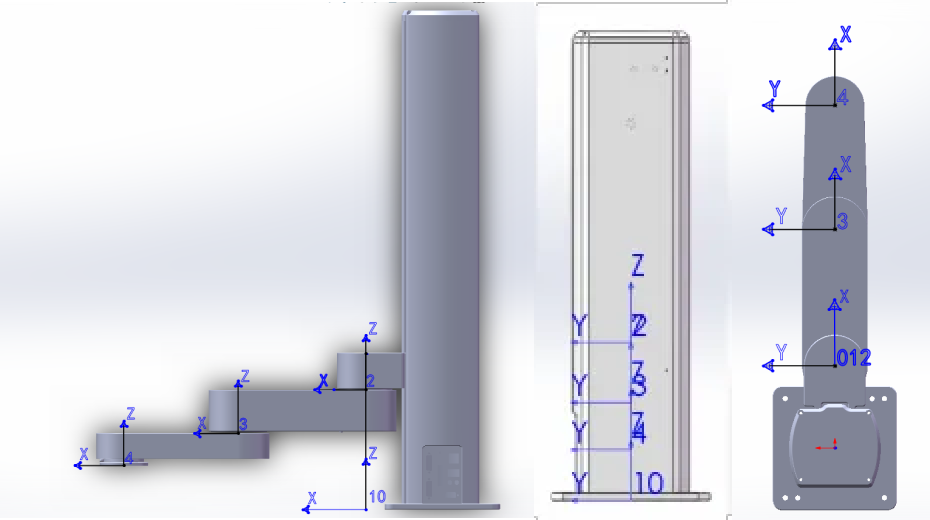
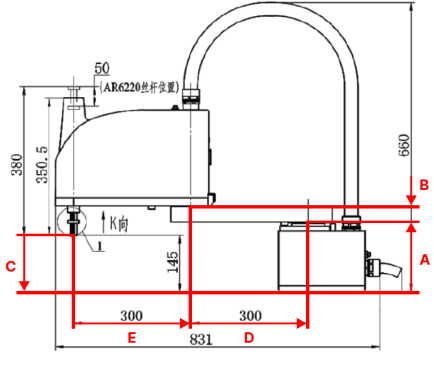
Scara_FourAxis_Translation_1st |
説明 |
4 軸 Scara ロボット +1 軸が平面移動 |
DH パラメータ図 |
|
座標系 各軸名 |
|
リンク、座標系、対応関係 |
0:座標系 0、1 |
1:座標系 0、1 |
|
2:座標系 2 |
|
3:座標系 3 |
|
4:座標系 4 |
|
軸 |
手首:4 |
前腕:3 |
|
上腕:2 |
|
ベース:0、1 |
|
型番 |
HITBOT Z-Arm 2442 |
[robot]_algo の例
{
"algo_type": "Scara_FourAxis_Translation_1st",
#DH parameters [meter]
"dh": [ A, B, C, D, E ],
#joint limits [millimeter,degree,degree,degree]
"min_limits": [ J1 min, J2 min, J3 min, J4 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max ],
#joint positions at standard pose [meter,degree,degree,degree]
"mastering_joints": [ J1, J2, J3, J4 ],
#joint orientations [0/1]
"axis_flip": "J1J2J3J4",
#robot base location [meter,meter,meter,degree,degree,degree]. If robot has not been moved, robot base frame equals to World frame.
"robot_frame_in_robot_base_frame": [ x, y, z, rx, ry, rz ],
#robot flange frame orientation [x/y/z]
"flange_frame_orientation": "z"
}Scara_FourAxis 4 軸 Scara
軸数 |
4 軸 |
構造名 |
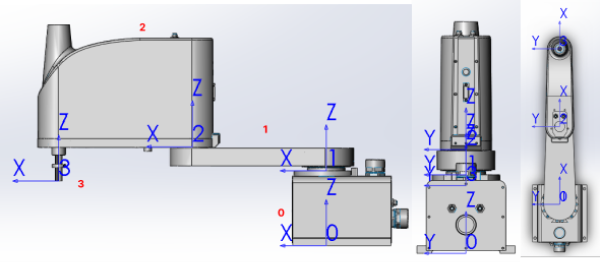
Scara_FourAxis |
説明 |
4 軸 SCARA |
DH パラメータ図 |
|
座標系 各軸名 |
|
リンク、座標系、対応関係 |
0:座標系 0、1 |
1:座標系 0、1 |
|
2:座標系 2 |
|
3:座標系 3 |
|
軸 |
手首:3 |
前腕:2 |
|
上腕:1 |
|
ベース:0 |
|
型番 |
ADTECH AR6215 |
[robot]_algo の例
{
"algo_type": "Scara_FourAxis",
#DH parameters [meter]
"dh": [ A, B, C, D, E ],
#joint limits [degree,degree,millimeter,degree]
"min_limits": [ J1 min, J2 min, J3 min, J4 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max ],
#joint positions at standard pose [degree,degree,meter,degree]
"mastering_joints": [ J1, J2, J3, J4 ],
#joint orientations [0/1]
"axis_flip": "J1J2J3J4",
#robot base location [meter,meter,meter,degree,degree,degree]. If robot has not been moved, robot base frame equals to World frame.
"robot_frame_in_robot_base_frame": [ x, y, z, rx, ry, rz ],
#robot flange frame orientation [x/y/z]
"flange_frame_orientation": "z"
}