出力
パラメータ説明
ポートタイプ
入力ポートのタイプを選択するために使用されます。
オプション:
-
カスタム:実際の状況に応じて設定する必要があります。
-
事前定義済み(ビジョン結果):初期値となります。プロジェクトに経路計画に関連するステップが含まれていない場合に使用します。
-
事前定義済み(ロボット経路):プロジェクトに経路計画に関連するステップが含まれている場合に使用します。
- カスタム
-
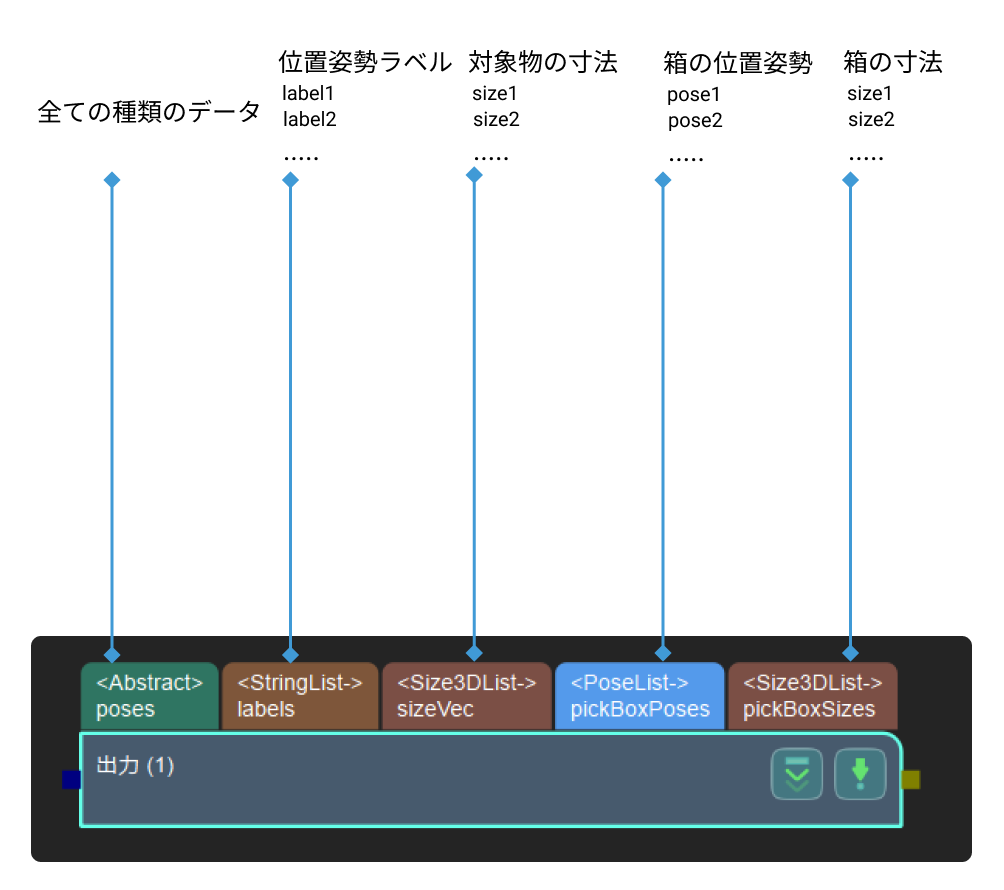
パラメータ説明:外部通信へ出力されるデータタイプを設定するために使用されます。
設定手順:
-
外部通信への出力データタイプを設定 をクリックし、 出力設定アシスタント の画面に入ります。
-
事前定義された通信キー または カスタマイズの通信キー でポートを追加します。
-
事前定義された通信キー:必要なポートにチェックを入れます。
-
カスタマイズの通信キー:空白場所をクリックし、下部にある 追加 をクリックしてポート名を入力します。
カスタマイズの通信キーの名前を変更しないと、ポートが有効になりません。
-
-
確認 をクリックすると、設定が完了します。
-