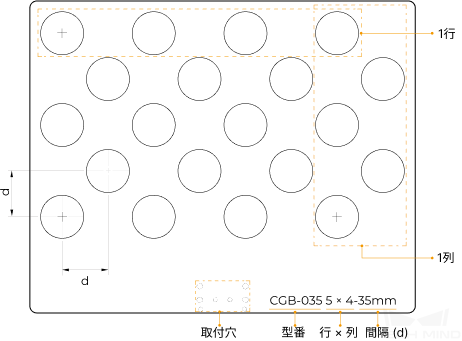
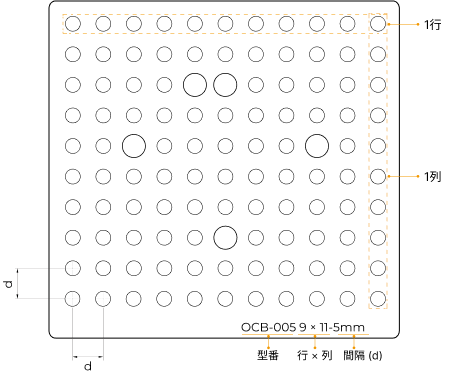
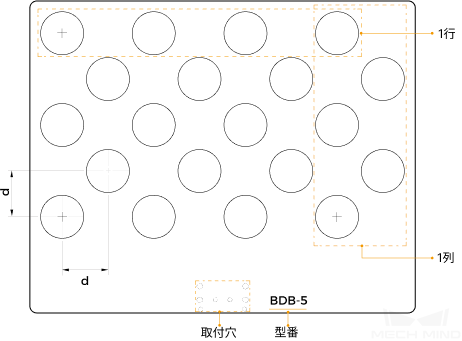
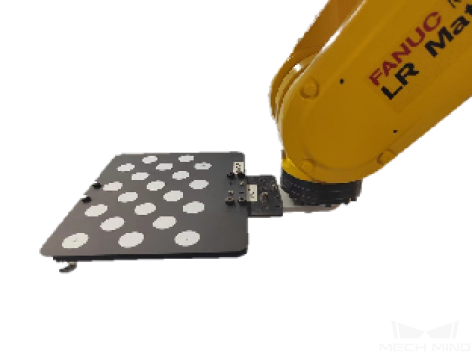
キャリブレーションボード 現在ご覧いただいているのは1.8.2 バージョンの内容です。異なるバージョンを参照する場合は、画面右上のボタンから切り替えが可能です。 ■ 最新版をご利用される場合は、弊社ホームページよりダウンロードが可能です。ダウンロードにはパスワードが必要となりますので、サポート窓口までお問い合わせください。 ■ ご利用中のバージョンが分からない場合や、サポートが必要な場合はお気軽にサポート窓口までご連絡ください。 キャリブレーションボードは内部パラメータのチェックや外部パラメータのキャリブレーションによく使われます。以下では、キャリブレーションボードの種類と型番、取り付け方法について説明します。 キャリブレーションボードの種類と型番 Mech-Mindが提供するキャリブレーションボードは、以下の3種類があります。 CGB V4カメラに適用可能です。 型番 説明図 d(mm) 行 列 CGB-020 20 5 4 CGB-035 35 5 4 CGB-050 50 5 4 OCB OCBキャリブレーションボードには取り付け穴がないため、ロボットハンドに取り付けることはできません。カメラがEye in Hand(EIH)方式で取り付けられている場合に使用できます。 型番 説明図 d(mm) 行 列 OCB-005 5 9 11 OCB-010 10 9 11 OCB-020 20 9 11 BDB V2とV3カメラに適用可能です。 型番 説明図 d(mm) 行 列 BDB-5 20 5 4 BDB-6 35 5 4 BDB-7 50 5 4 取り付け方式 以下のキャリブレーションシーンでは、キャリブレーションボードをロボット先端に取り付けることができます。 自動キャリブレーション(ETH) 標準キャリブレーション法を使用する手動キャリブレーション(ETH) その他のキャリブレーションシーンや内部パラメータのチェックでは、キャリブレーションボードを取り付ける必要はなく、キャリブレーションボードを作業平面の中心に平らに配置してください。 キャリブレーションボードの一般的な取り付け方法は以下の通りです。 直接取り付け フランジによる取り付け この情報は役に立ちましたか? フィードバックを送信 ありがとうございます! ご意見・ご要望がございましたら、以下よりお寄せください: オンラインコミュニティ フィードバックフォーム ソフトウェアライセンス キャリブレーションボールの取扱説明書(EIH)