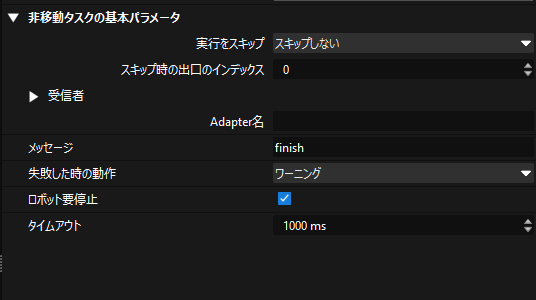
通知 現在ご覧いただいているのは1.8.2 バージョンの内容です。異なるバージョンを参照する場合は、画面右上のボタンから切り替えが可能です。 ■ 最新版をご利用される場合は、弊社ホームページよりダウンロードが可能です。ダウンロードにはパスワードが必要となりますので、サポート窓口までお問い合わせください。 ■ ご利用中のバージョンが分からない場合や、サポートが必要な場合はお気軽にサポート窓口までご連絡ください。 機能 外部サービスへカスタマイズの通知を送信します。 使用シーン 外部サービスと通信する必要があるときに使用します。 パラメータ 受信者 DO 信号を受信するデバイスに応じて選択します。「ロボット」、「標準インターフェイス」、「Adapter」を選択できます(「Adapter」を選択した場合に「Adapter名」を入力してください)。複数選択は可能です。 このパラメータを設定しなければ、DO 信号を送信できません。 Adapter 名 Adapter は Adapter 名 によってこのステップの情報を取得します。プロジェクトには複数の 通知 ステップがある場合、すべての 通知 ステップに同じ Adapter 名 を指定しなければなりません。 メッセージ メッセージをカスタマイズします。Adapter はメッセージによって異なるステップを実行します。 失敗した時の動作 通知のメッセージを送信できなかった場合に実行する動作を選択します。 オプション: ワーニング:ワーニングします(初期値)。 再試行:再度試行します。 破棄:ステップを破棄します。 ロボット要停止 チェックすると、ロボットがこのステップで停止します。チェックを外すと、実行していると同時にメッセージを送信します。 タイムアウト 指定した時間内にメッセージを送信しない場合、ロボットが 失敗した時の動作 を実行します。 例 Adapter 名 を設定し、計画が失敗したメッセージを Adapter に送信します。失敗した時のメッセージを finish に設定します。 この情報は役に立ちましたか? フィードバックを送信 ありがとうございます! ご意見・ご要望がございましたら、以下よりお寄せください: オンラインコミュニティ フィードバックフォーム 制御を移転 分類