ロボットのDHパラメータをチェック
ロボットとビジョンシステムが関節角度を介して位置姿勢データを送信する場合、ロボットのDHパラメータの正確性がロボットの精度に影響します。以下では、ロボットのDHパラメータとそれをチェックする方法について説明します。
DHパラメータとは
ロボットのDHパラメータは、ロボットの関節とリンクの特性を記述するために使用されます。これらのパラメータは、ロボットの幾何学的および動力学的特性を理解し、ロボットの動きをより良く制御するのに役立ちます。
DHパラメータを使用することで、ロボットの形状と寸法を確認し、異なる関節角度でのロボットの位置と姿勢を特定できます。
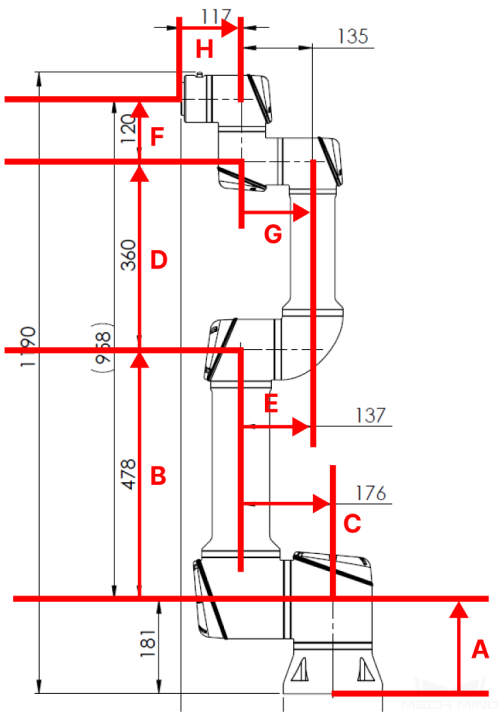
例えば、6軸の協働ロボット(UR5など)のDHパラメータは以下の通りです。
DHパラメータの使用シーン
一部のピッキングシーンでは、ロボットのDHパラメータが使用されることがあります。例えば:
-
一部のロボットのハンド・アイキャリブレーション(Vizティーチング通信)。
-
ロボットの関節角度情報のみを受信するシーン(EIHカメラ取り付け方法)。
-
ロボットに経路点の関節角度情報を送信するシーン。
DHパラメータのチェック
ロボットとビジョンシステムが関節角度を介して位置姿勢データを送信する場合、ロボット実機のDHパラメータが仮想ロボットのDHパラメータと一致しない場合、ロボットの精度誤差が生じる可能性があります。そのため、ロボットのDHパラメータをチェックする必要があります。チェック手順は以下の通りです。
-
ロボットの取扱説明書を参照し、ロボット実機のDHパラメータを確認します。
-
ロボットモデルライブラリから仮想ロボットのDHパラメータを確認します。
-
ロボット実機と仮想ロボットのDHパラメータを比較します。DHパラメータが一致しない場合は、[robot]_algo.jsonファイルを修正する必要があります。
詳細については、 ロボットモデルパラメータの検証方法 をご参照ください。