Online
落下配置
落下配置を有効にする
チェックすると、箱が配置位置から Z 方向に沿う距離がある範囲にある場合に、落下によって配置することができます。
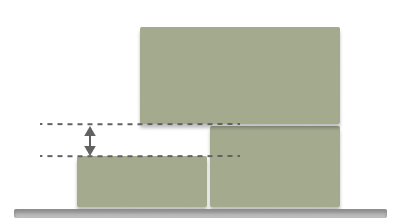
低い箱を高い箱の間に配置するときに落下させます。これにより、衝突を回避可能です。
落下高さ |
箱を Z 方向に落下させる高さを設定する(単位:mm) |
安全落下間隔 |
配置する箱の側面と隣接する箱の最小間隔(単位:mm) mm。 |
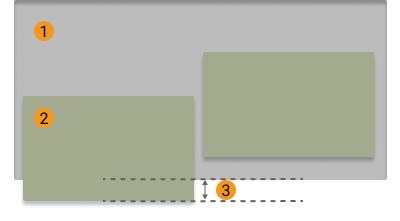
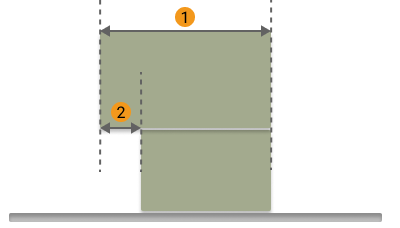
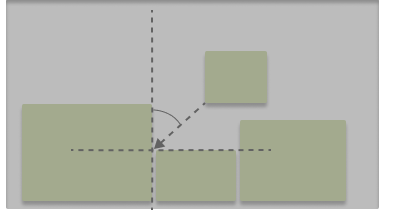
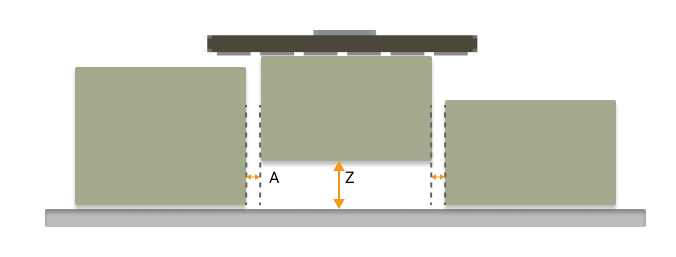
下図では Z は落下高さであり、A は安全落下間隔です。
再撮影して箱の寸法を更新
デフォルトでチェックが外れています。視野が足りなくて一回撮影して全ての情報を取得できない場合に二回撮影が必要です。チェックすると二回撮影を実行します。
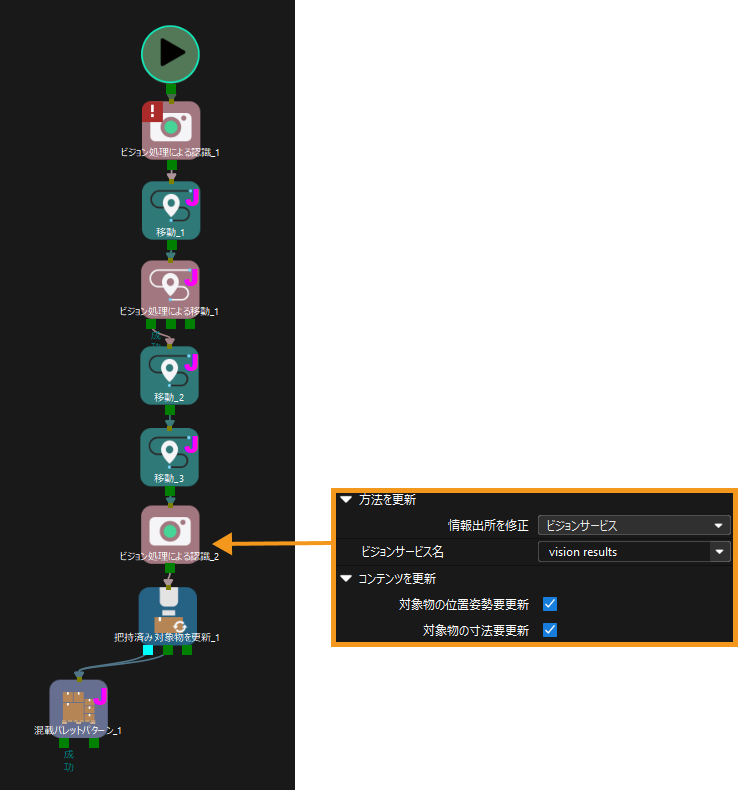
「ビジョン処理による移動」ステップを使用して箱を把持したが箱の高さがわからない場合、「混載パレタイジング」ステップは箱の高さを推定し、推定の結果に基づいて計画します。二回撮影を実行して箱の高さを取得した後、「混載パレタイジング」ステップはビジョンプロジェクトで認識された実際の箱の高さを使用して二回目の計画を実行します。
| 「把持済み対象物を更新」ステップと合わせて使用する必要があります。 |
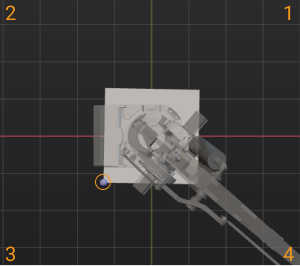
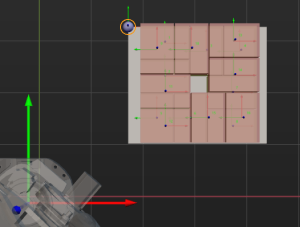
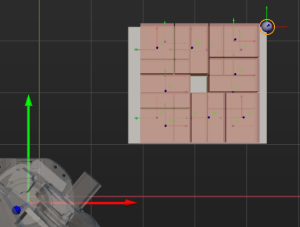
下図では、箱を撮影位置に移動して二回目に撮影し、「把持済み対象物を更新」ステップによって箱の位置姿勢と寸法を更新します。