経路計画設定ツール
| 経路計画設定ツールとMech-Vizは、一部のパラメータや使用方法に違いがあります。そのため、使用する際には混同しないようにそれぞれを個別に使用することをお勧めします。 |
以下では、ロボット経路計画設定ツールとその使用方法について説明します。
機能
経路計画設定ツールは、部品の周囲でロボットの衝突のない動作経路を計画するために使用されます。
ロボットの動作経路は、実際にロボットハンドがタスクを完了するまでの経路です。ロボットの動作に伴い、ロボットハンドが対象物やシーンの物体と衝突することもあります。したがって、経路計画や衝突検出に必要な各種リソースやデータを提供するためには、ロボットが位置するシーンの作成、ロボットハンドの設定、ビジョンポイントおよびシーンの点群の入力が必要です。経路計画設定ツールでは、これらのリソースやデータをインポートし、衝突検出や経路計画を完了させ、「経路計画」ステップでロボットの動作経路を出力し、把持などのタスクのためのロボットの制御を行うことができます。
使用手順
経路計画設定ツールを使用する前に、ポートタイプに従って 経路計画 ステップに対応する入出力ポートを接続する必要があります。
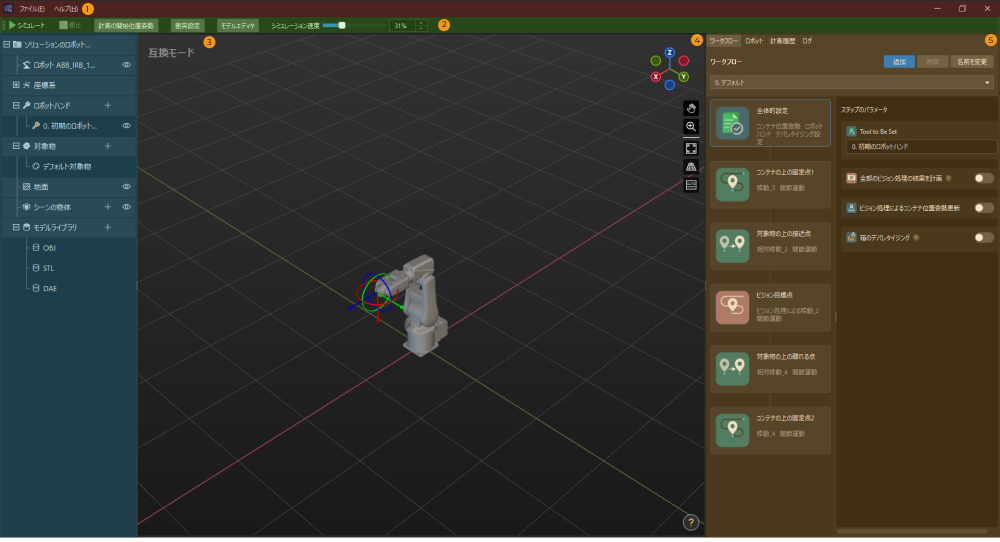
ポートを接続した後、経路計画ステップのパラメータで エディタを開く をクリックし、ロボット型番選択のポップアップウィンドウで、 お使いのロボット実機に従ってロボットモデルを選択 し、経路計画設定ツールに入ります。
一般的な使用手順は以下の通りです。以下のリンクをクリックして詳細な内容をお読みください。
プロジェクトに必要なロボットハンド、ワーク、シーンの物体などのリソースを設定します。 |
|
フローチャート形式でロボットの動作制御プログラムを作成します。 |
|
ロボットの移動経路における衝突の可能性を検出します。 |
|
仮想ロボットを使用してプロジェクトのデバッグを実行します。 |