DI をチェック
| 1.8.0 バージョンでは、「DI をチェック」ステップと「DI リストをチェック」ステップは新しい「DI をチェック」ステップに統合されています。 |
機能
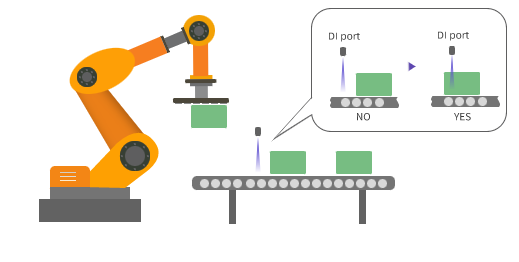
ロボット産業においては、「DI」とはデジタル入力信号を指します。DI 信号は、外部デバイスまたはセンサーの状態を検出・監視します。
このステップを使用すると、指定した DI ポートの信号を読み取り、それにより異なるワークフローを実行します。
パラメータ説明
シミュレート時実行内容
シミュレート時にステップ動作を選択するために使用します。
-
外部入力を確認する
シミュレーションにこのステップを実行した時、本当の外部入力を確認し、かつその入力に応じて出口を選択します。
-
特定の出口から実行する
特定の出口を指定し、シミュレーションにこの出口の後続ワークフローを実行します。
-
出口を手動で指定する
このステップを実行する時に出口選択のウィンドウが表示されます。出口を指定してから続けて実行します。
事前計画する出口のインデックス
| 計画:ソフトウェアは衝突が発生しない、かつスムーズに目標位置に到達するロボット移動経路を計算する過程。 |
計画を中断する可能性があるステップに対し、ソフトウェアは計画段階にこのようなステップの出口を予知することはできません。 事前計画のために出口を指定することができます。
このステップは実際の DI 信号を検知してから対応するポートのワークフローを実行するので計画を中断します。このステップの前後のステップを接続して計画し、スムーズなロボット動作を実現するために、事前計画の出口を指定して対応するポートの後続ワークフローを指定することができます。
-
-1 に設定すると、DI 信号をチェックし、全体の計画を中断します。
-
0 あるいは 0 以上に設定すると、信号は対応するポートから出力され、このステップの前と後のステップを接続して計画を実行します。これによってロボットがさらにスムーズに移動します。
また、実際の出口と事前計画の出口が一致しない場合は、実際の出口から再度計画します。
実行モード
ソース
「カスタマイズ」と「ビジョン処理による移動」を選択できます。
-
ビジョン処理による移動
箱のデパレタイジングに使用されます。ソフトウェアは吸盤の下表面に覆われる箱の範囲に基づいて検出する DI ポート番号を自動的に計算します。
-
カスタマイズ
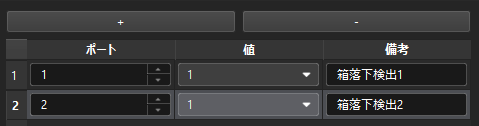
検査したい DI ポートと信号値を手動で指定します。以下のように設定します。
-
実際に検査したいポートの数に基づいて、+をクリックしてポートを追加します。
-
検査したいポート番号と信号値を設定し、その機能を備考に入力します。
-
ポート番号は重複してはいけません。
-
ポートの機能を見分けるためにいちいち備考を編集してください。
-
追加したポートを削除するには、そのポートを選択してから-をクリックしてください。
-
-
調整の例
-
「ソース」を「ビジョン処理による移動」に設定します。DI ポートと値は「デパレタイズ用吸盤設定」で設定します。
パラメータ設定
説明
いずれかが要件を満たしている+一回チェック
いずれかの DI ポートが要件を満たしたら、「いずれかが要件を満たしている」ポートの後のワークフローを実行する。どの DI ポートも要件を満たさなかったら、「全部満たさない」ポートから実行する。
いずれかが要件を満たしている+連続チェック
タイムアウトになる前にチェックし続ける。いずれかの DI ポートが要件を満たしたら、「いずれかが要件を満たしている」ポートの後のワークフローを実行する。タイムアウト時間になったら「タイムアウト」ポートから実行する。
全てが要件を満たしている+一回チェック
全ての DI ポートが要件を満たしたら、「全てが要件を満たしている」ポートの後のワークフローを実行する。そうでないと「少なくとも 1つが満たさない」ポートから実行する。
全てが要件を満たしている+連続チェック
タイムアウトになる前にチェックし続ける。全ての DI ポートが要件を満たしたら、「全てが要件を満たしている」ポートの後のワークフローを実行する。タイムアウト時間になったら「タイムアウト」ポートから実行する。
-
「ソース」に「カスタマイズ」に設定します。DI1、DI2、DI3 の 3つのポートを追加するとします。
パラメータ設定
説明
いずれかが要件を満たしている+一回チェック
いずれかの DI ポートが要件を満たしたら、そのポートの後のワークフローを実行する。どの DI ポートも要件を満たさなかったら、「全部満たさない」ポートから実行する。
いずれかが要件を満たしている+連続チェック
タイムアウトになる前にチェックし続ける。いずれかの DI ポートが要件を満たしたら、そのポートの後のワークフローを実行する。タイムアウト時間になったら「タイムアウト」ポートから実行する。
全てが要件を満たしている+一回チェック
全ての DI ポートが要件を満たしたら、「全てが要件を満たしている」ポートの後のワークフローを実行する。そうでないと「少なくとも 1つが満たさない」ポートから実行する。
全てが要件を満たしている+連続チェック
タイムアウトになる前にチェックし続ける。全ての DI ポートが要件を満たしたら、「全てが要件を満たしている」ポートの後のワークフローを実行する。タイムアウト時間になったら「タイムアウト」ポートから実行する。