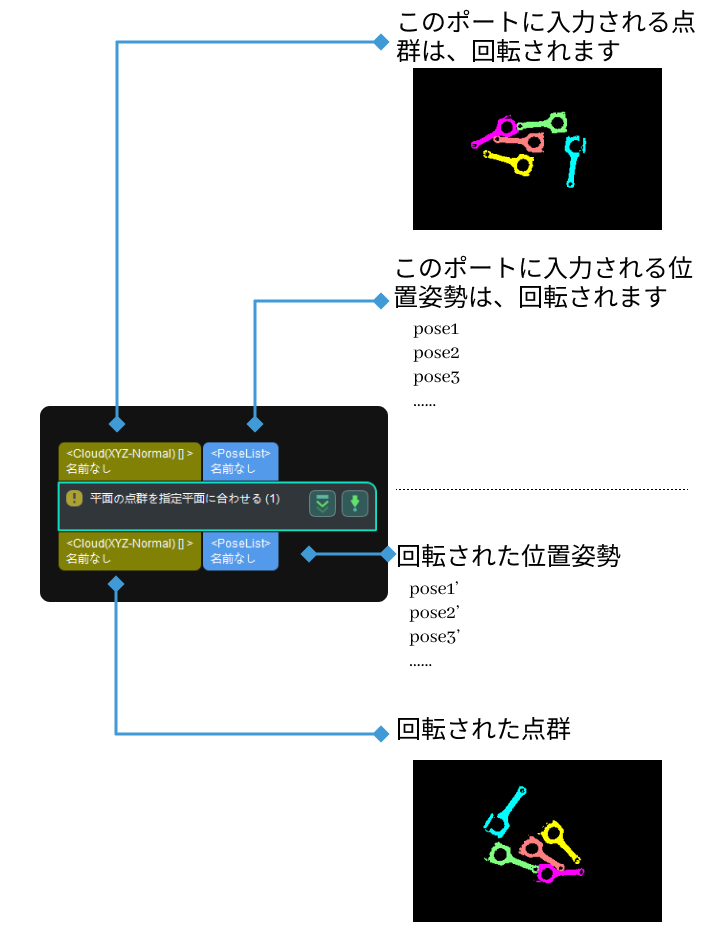
平面の点群を指定平面に合わせる 現在ご覧いただいているのは1.8.2 バージョンの内容です。異なるバージョンを参照する場合は、画面右上のボタンから切り替えが可能です。 ■ 最新版をご利用される場合は、弊社ホームページよりダウンロードが可能です。ダウンロードにはパスワードが必要となりますので、サポート窓口までお問い合わせください。 ■ ご利用中のバージョンが分からない場合や、サポートが必要な場合はお気軽にサポート窓口までご連絡ください。 このステップの内容は、現在メンテナンス中です。このステップに関する詳細が必要な場合は、当社(docs@mech-mind.net)までお問い合わせください。 機能 設定された方向によって、入力点群および対応する位置姿勢を回転します。 使用シーン 特定のシーン向けのカスタマイズのステップです。 入力と出力 この情報は役に立ちましたか? フィードバックを送信 ありがとうございます! ご意見・ご要望がございましたら、以下よりお寄せください: オンラインコミュニティ フィードバックフォーム 画像変換 点群変換(直行ロボット)