ロボットハンドを切り替え
機能
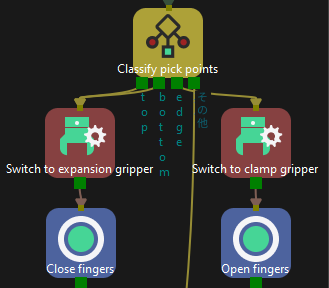
TCP またはロボットハンドモデルを切り替えます。
-
ソフトウェア:TCP またはロボットハンドモデルを切り替えます。
-
ロボット:TCP を切り替えます。実際のロボットハンドの切り替えは、「DO を設定」ステップと併用する必要があります。
TCP またはロボットハンドモデルを切り替えます。
ソフトウェア:TCP またはロボットハンドモデルを切り替えます。
ロボット:TCP を切り替えます。実際のロボットハンドの切り替えは、「DO を設定」ステップと併用する必要があります。