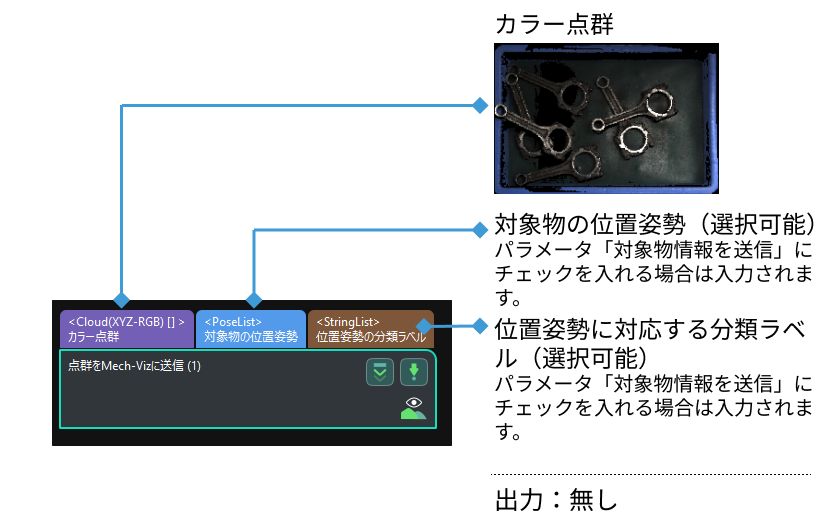
点群をMech-Vizに送信
パラメータの説明
点群設定
- 入力点群のタイプ
-
初期値:CloudXYZRGB(カラー点群)
オプション:CloudXYZRGB(カラー点群)、CloudXYZ(点群)、CloudNORMAL(法線ベクトル付きの点群)。
調整説明:実際のニーズに応じて送信する点群のタイプを選択します。
調整の例:CloudXYZRGB、CloudXYZ、CloudNORMALをそれぞれ選択した場合の入力点群のタイプを下図に示します。



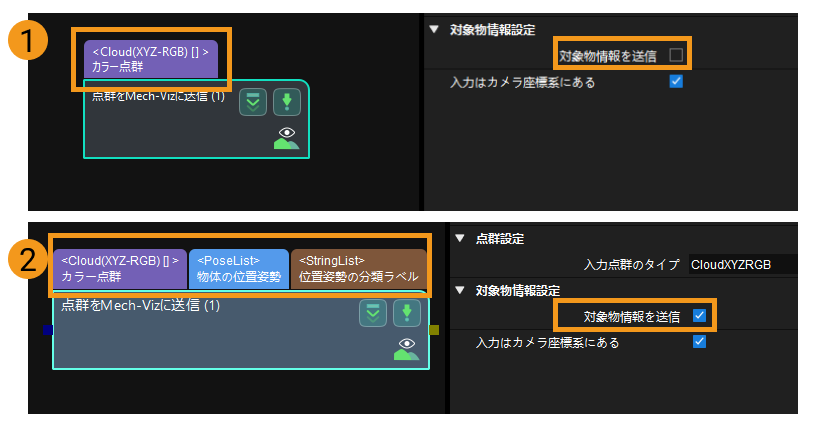
対象物情報設定
- 対象物情報を送信
-
初期値:チェックを入れない
調整説明:チェックを入れない場合、 物体の位置姿勢 と 位置姿勢の分類ラベル ポートは表示されません。チェックを入れると、 物体の位置姿勢 と 位置姿勢の分類ラベル ポートが表示されます。実際のニーズに応じて設定してください。下図に示すように、①はチェックを入れる前の状態で、②はチェックを入れた後の状態です。
すべての入力はカメラ座標系にある
初期値:チェックを入れる。
調整説明:点群と位置姿勢がカメラ座標系にある場合はチェックを入れ」ます。チェックを入れると、入力点群情報がロボット座標系に変換されて、Mech-Vizに送信されます。チェックを外すと、入力点群情報がMech-Vizに直接送信されます。