互換モードについて
互換モードでは、一部のロボットにおいて、ロボット実機とソフトウェアの仮想空間のロボットの位置姿勢を同期するとき、ティーチペンダントに表示されるツール位置姿勢の値がソフトウェアに表示されるツール位置姿勢の値と一致しない場合があります。 この問題が発生する既知のロボットには、FANUCの4,5,6軸シリーズ、YASKAWAの4,5,6軸シリーズ、KAWASAKIの6軸Rシリーズ、STAUBLIの6軸シリーズ、AUBOの全シリーズ、HAN’S ROBOTの全シリーズがあります。
互換モードでは、ソフトウェアが標準インターフェース通信またはVizティーチング通信を通じてロボットと通信する際に、この差が自動的に補正されます。ただし、手動キャリブレーション、ティーチング方法による把持位置姿勢設定、またはAdapterを介して計画・認識された結果をツール位置姿勢の形式でロボットに送信する場合は、ツール位置姿勢の差を手動で補正する必要があります。
手動補正が必要なシーン
| FANUCの4,5,6軸シリーズ、YASKAWAの4,5,6軸シリーズ、KAWASAKIの6軸Rシリーズ、STAUBLIの6軸シリーズ、AUBOの全シリーズ、HAN’S ROBOTの全シリーズなど、特定のロボットを使用する場合、手動キャリブレーション、ティーチング方法による把持位置姿勢設定、またはAdapter通信のプロセスでは、手動で補正値を追加する必要があります。 |
手動キャリブレーション
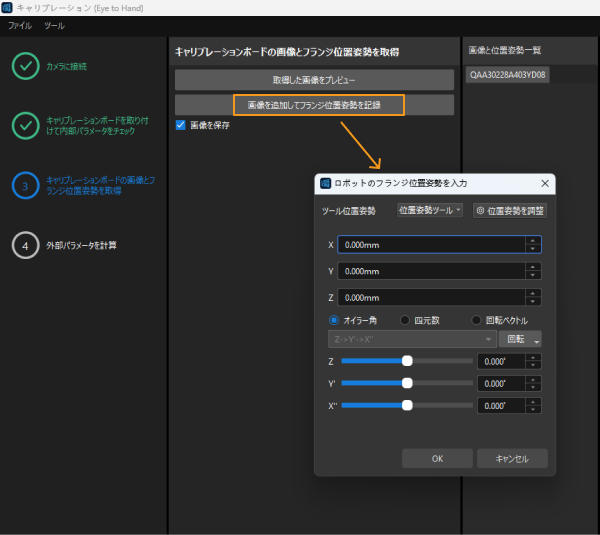
手動キャリブレーション中に、 画像を追加してフランジ位置姿勢を記録 をクリックした後、表示される ロボットのフランジ位置姿勢を入力 画面に、ロボットのフランジ位置姿勢データを入力します。
ティーチペンダントから読み取ったツール位置姿勢のZ値には補正値を追加し、その結果を対応するZパラメータフィールドに入力します。
補正値の取得方法
補正値を取得するには、以下の方法を使用します。
-
ロボット実機とソフトウェアに使用される仮想ロボットを同期させ、ティーチペンダントに表示されるロボットのツール位置姿勢とソフトウェアに表示されるロボットのツール位置姿勢のZ値の差を確認します。これが補正値となります。
下表のロボットを例として説明します。
|
|
ティーチペンダントに表示されるツール位置姿勢 |
Mech-Vizに表示されるツール位置姿勢 |
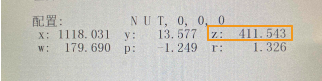
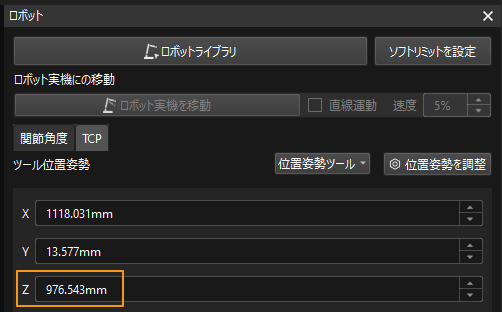
ティーチペンダントに表示されるツール位置姿勢のZ値は411.543で、Mech-Vizに表示されるツール位置姿勢は976.543です。したがって、補正値は976.543 - 411.543 = 565mmとなります。
-
ロボットのパラメータファイルを確認し、dhパラメータの最初の値(dh1)を読み取るか、パラメータファイル内のZoffsetの値を読み取ると、補正値が得られます。
下表のロボットを例として説明します。
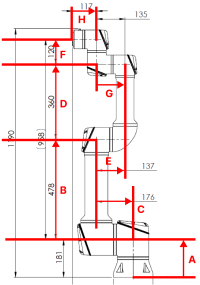
UR_16E_algo.json内のdh1がAで、dhパラメータ図からAが181mmです。したがって、補正値は181mmとなります。
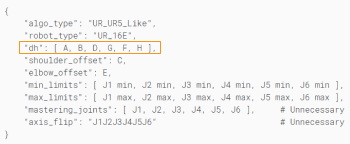
UR_16E_algo.json
dhパラメータ図