相対移動
パラメータ
移動ステップの共通パラメータ
移動目標点を送信
デフォルトではチェックが入っています。相手側(ロボットなど)に移動目標点の位置姿勢を送信します。チェックを外したら送信しませんが、この目標点位置姿勢は依然として経路計画の一部です。
移動コマンドの後の非移動コマンドをスムーズに実行することを試行
デフォルトではチェックが外れており、 移動ステップ の間に「ビジョン処理による認識」、「DO を設定」、「DI をチェック」などの 非移動ステップ を接続すると、ロボット移動経路の計画を中断し、ロボット実機動作中に一時中止することがあります。
チェックを入れると現在のステップ実行が完了しなくても続行することが可能です。これにより、ロボットがよりスムーズに動作します。ただし、ステップが途中で終了する可能性があります。
ステップが途中で終了する原因は何ですか?
Mech-Viz 実行中、ロボットに同時に複数の位置姿勢を送信しますが、最後の位置姿勢が現在のロボットの関節角度と一致しているかのみを判断します。一致していると判断したら、ロボットが最後の位置に到達していると見なします。
例えば、10 の移動ステップがある経路では、移動ステップ 5 の位置姿勢は最後のステップの位置姿勢とは同じとします。ロボットが低速に動作し、移動ステップ 5 の位置に到達したらその位置の関節角度を Mech-Viz に送信します。経路では、移動ステップ 5 の位置姿勢は最後の移動ステップの位置姿勢とは同じなので、Mech-Viz はロボットの動作が完了したと判断して途中で実行を終了します。
配置された対象物との衝突を検出しない
デフォルトではチェックが外れていおり、配置された対象物との衝突を検出します。チェックすと、ロボット本体・ロボットハンドと配置された対象物との衝突を検出しません。
パレタイジングのシーンでは、以下の場合があります。
-
ロボットが段ボール箱を配置するときに配置済みの箱と軽く衝突する(箱の凹みや変形などが発生しない)ことがあります。Mech-Viz ではこのような衝突を検出したら別の配置位置を計画するためパレットが満杯になりません。
-
普通、吸盤を使用する場合、TCP を吸盤の表面でなく、モデル内部に設定するため、物体を吸着する時、吸盤と把持する箱のモデルと重なります(ソフトウェアでは吸盤と把持対象物との衝突を検出しない)。ロボットが箱を配置してから、把持された箱のモデルはシーンのモデルになり、吸盤がシーンの箱のモデルと衝突すると判断してメッセ―ジを表示してパレタイジングが続行できなくなります。
これをチェックするとロボット本体やロボットハンドと配置済み対象物モデルとの衝突を検出しないので上記の問題を解決できます。
点群との衝突検出モード
現場の状況に応じて設定してください。普通、デフォルトの 自動 を使用します。ロボットが物体を把持する前の移動ステップは、 チェックしない を選択し、把持した後の移動ステップを チェック を選択します。
自動 |
初期値。「ビジョン処理による移動」ステップと「ビジョン処理による移動」ステップに依存する「相対移動」の点群衝突だけを検出します。 |
チェックしない |
移動ステップの点群衝突をいっさい検出しません。 |
チェックする |
全ての移動ステップの点群衝突を検出します。 |
| をオンにすれば、Mech-Viz は経路計画を行うときにロボットモデル、ツールモデルと点群との衝突を検出します。 普通、点群衝突の設定は、ロボットが把持を実行するときに把持対象物との衝突を検出するためです。空間内にノイズがあれば、ソフトウェアは対象物を把持する前の経路を計画するときに、ノイズがロボットモデル、ツールモデルと接触して点群との衝突が誤って判断されて経路計画の誤りが発生します。 |
対象物の対称性を使用しない
このパラメータは、 目標点タイプ が 対象物位置姿勢 の移動ステップ(目標点タイプが物体の位置姿勢の移動ステップ、パレタイジングステップなど)に対してのみ有効です。目標点のタイプが関節角度、TCP位置姿勢の移動ステップには無効です。
無し |
無し:初期値。対称性を無効にしません。 |
Z 軸 |
Z 軸の対称性のみを使用しません。 |
XY 軸 |
X、Y 軸の対称性のみを使用しません。 |
全て |
物体の対称性を使用しないように設定すると、ロボットが物体の位置姿勢に正確に到達して対象物を配置します。 |
| 対象物を把持できない場合に の 回転対称 を設定します。 対象物に対称性がある場合、複数の候補位置姿勢があります。Mech-Viz は対象物を把持する時、デフォルトの位置姿勢で把持できない場合に候補位置姿勢も試行します。 物体対称位置姿勢と Mech-Vision によって出力された元位置姿勢とは一致しなければ、ロボットによる対象物の配置位置姿勢は一致しないことがあります。 |
計画が失敗した時の出口
チェックすると、「計画に失敗」出口が追加されます。
計画に失敗した時には「計画に失敗」出口から実行します。
把持された対象物との衝突検出モード
シーンの物体との衝突を検出しない
デフォルトではチェックが外れています。チェックすると*把持された対象物*と*シーンの物体、ロボット*との衝突を検出せず、Mech-Viz の計画の速度を改善できます。普通、ロボットが対象物を把持したあとの移動ステップに使用します。
衝突を検出しなければ、衝突が発生するリスクがあるので注意して使用してください。
の把持されている対象物とその他の物体との衝突を検出をオンにすれば、把持されている対象物とシーンの物体のモデル・ロボットとの衝突を検出します。
パレタイジングのシーンでは、ビジョン処理により取得した箱の寸法にはささやかな誤差があり、把持を実行する時に箱同士の摩擦が発生しますが衝突は発生しません。 この場合に検出しなくてもいいです。検出すると余計な計算が発生するため Mech-Viz 実行効率が低下します。 パレタイズのシーンでは、「シーンの物体との衝突を検出しない」をチェックしても対象物と配置済みの箱との衝突検出に干渉しません。 箱の山の下にシーンの物体がある場合、経路計画のためにこれをチェックしてください。
点群との衝突を検出しない
デフォルトではチェックが外れています。チェックすると 把持対象物のモデル と シーンの点群 が衝突するかを検出しないので、Mech-Viz での衝突検出計算量を低減し、計画の効率を向上させることができます。また、把持対象物と点群との衝突の誤検出も回避できます。
-
ウィンドウでの把持されている対象物とその他の物体との衝突を検出と点群設定の点群と他の対象物間の衝突を検出をオンにすれば、把持されている対象物とシーンの物体のモデル・ロボットとの衝突を検出します。
-
Mech-Vision が点群情報と対象物モデル情報を Mech-Viz に送信するときに、点群と対象物モデルは密着している状態です。ロボットが対象物を把持するときに、モデルはロボットの経路に沿って移動し、把持対象物モデルは点群と衝突します。
-
把持対象物は物体の点群と衝突する場合、この衝突をチェックすると Mech-Viz の計算量が増え、計画時間が長くなります。
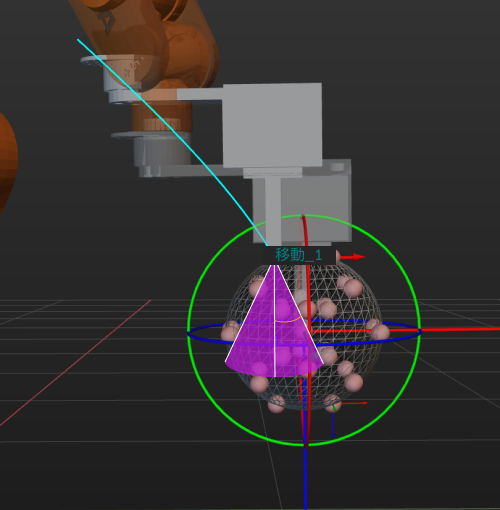
スマート障害物・特異点回避
現在のステップに対応する経路点を中心に複数の候補点を指定します。これによってロボットはより多くの経路を試行でき、衝突や特異点を回避することが容易になります。
スマート回避を有効にするをチェックして以下のパラメータを設定します。
基本的な移動設定
基本的な移動設定は、移動ステップの主なパラメータを設定し、ロボットが目標点に到達する 速度 と 運動方式 を決定します。
把持と配置設定
Mech-Viz プロジェクトのロジック検査に使用されます。現場の実行手順に応じて、把持をしてから配置するという基本的な原則に従って設定します。
未指定 |
初期値 |
把持 |
「ビジョン処理による移動」の前の移動ステップ。 |
放置 |
「ビジョン処理による移動」の後の移動ステップ。 |
運動タイプ
関節運動 |
ロボットが円弧に沿って走行します。スムーズに走行できるので特異点を回避することが可能。
|
直線運動 |
ロボットが直線に沿って走行します。
|
速度&加速度
速度&加速度は、ロボット動作のスピードを決定します。普通、加速度の値を速度より小さく設定します。加速度の値を速度よりも大きくしたらロボット動作がスムーズでなくなります。
| ロボットが安定に把持を実行するように、「ビジョン処理による移動」とその前後のステップの速度を低く設定してください。 |
ブレンド半径
調整説明:通常、初期値を使用すればいいです。
-
レンド半径とは、回転する位置が目標点までの距離であり、大きいほどロボットの動きはスムーズになります。ロボットが狭いスペースで動作する場合、ブレンド半径を大きく設定する必要はありません。
-
ロボットがより広いスペースで動作し、障害物がなくて 2つの経路の間に距離が遠い場合、ロボットがスムーズに動くように、ブレンド半径を大きく設定することができます。
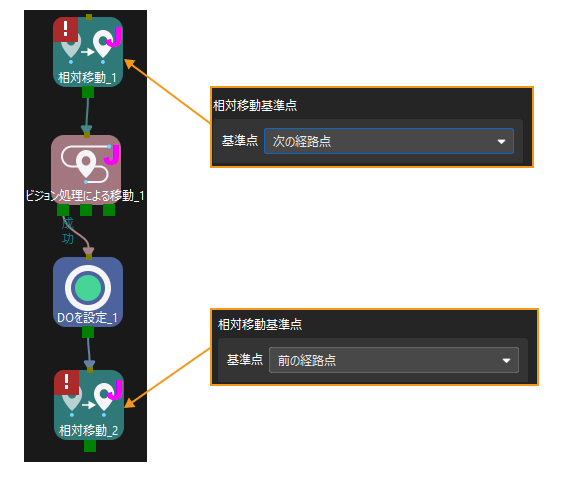
相対移動基準点
-
次の経路点
次の経路点を基準に移動します。把持/配置の前に使用し、把持/配置点に近づきます。
-
前の経路点
前の経路点を基準に移動します。把持/配置の後に使用し、把持/配置点に近づきます。
目標点タイプ
基準経路点(「前の経路点」または「次の経路点」)のロボットハンド座標系原点を基準とします。 |
|
「基準経路点」から「ロボット座標系の方向」に沿ってオフセットします。 |
|
ある点を基準点として指定します。 |
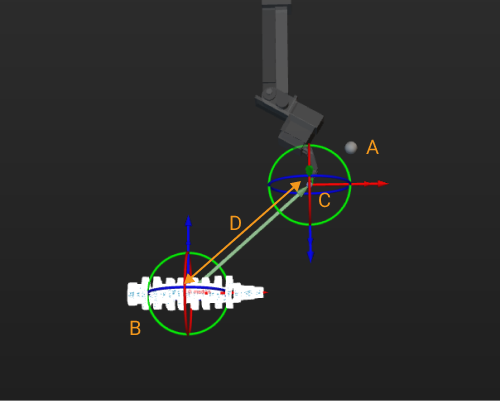
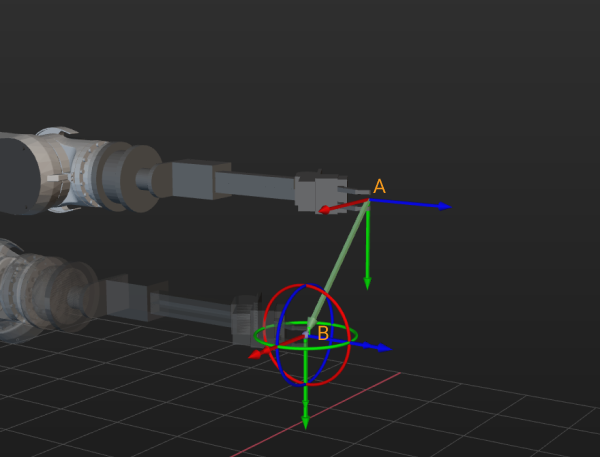
ロボットハンド
基準経路点(「前の経路点」または「次の経路点」)のロボットハンド座標系原点を基準とします。
-
座標:X、Y、Z 方向に沿うオフセット距離。
下図に示すように、A は基準経路点で、B は X、Y を 300 に設定した時のオフセット結果です。このステップを実行すると、ロボットは B から A に移動します。
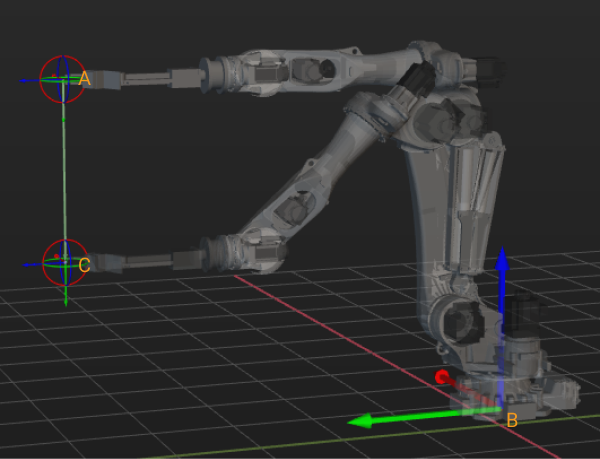
ロボット
「基準経路点」から「ロボット座標系の方向」に沿ってオフセットします。
-
座標:X、Y、Z 方向に沿うオフセット距離。
下図に示すように、A は基準経路点で、B はロボット座標系の原点で、C は Z を -1000 に設定した時のオフセット結果です。 このステップを実行すると、ロボットは C から A に移動します。