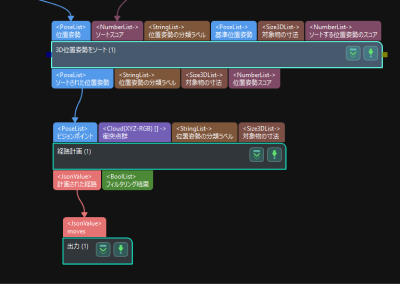
経路計画
機能
入力したビジョンポイントを用いてロボット動作経路を計画し、正常に計画したロボット動作経路を出力します。
|
使用シーン
通常、標準インターフェースやAdapterの通信方式で、ビジョン目標点付近のロボット動作経路のみを計画する必要があるプロジェクトで使用されます。経路計画は、シーンを作成し、ビジョンポイントを送信し、点群衝突を検出し、最終的に衝突のないロボット動作経路を出力することによって行われます。
このステップの前後のステップは以下の通りです。
-
前のステップ:位置姿勢調整と処理に関連するステップ。
-
後のステップ: 出力 (ポートタイプを「事前定義済み(ロボット経路)」に設定する必要があります)。
入力と出力
入力
-
ビジョンポイント:このポートに入力される位置姿勢は、ロボット動作経路を計画するために使用されます。
-
衝突点群:このポートに入力される点群は、ロボットハンドとの衝突検出を行うために使用されます。
-
位置姿勢のラベル:このポートは、各ビジョンポイントに対応する対象物のラベルです。
-
対象物の寸法:このポートは、各ビジョンポイントに対応する対象物の寸法です。
「シーンの物体の更新設定 > 入力ポートを有効化」 をオンにすると、以下の3つの入力ポートが表示されます。
-
シーンの物体名:シーンの物体の名前です。
-
シーンの物体の寸法:シーンの物体の寸法です。
-
シーンの物体の位置姿勢:シーンの物体の位置姿勢です。
パラメータの説明
経路計画の設定
ワークフローの設定
調整説明: 経路計画設定ツール を開いてワークフローの関連設定を行い、設定されたワークフローから1つを選択します。