ハンド・アイ・キャリブレーション(Eye to Eye)
以下では、カメラがEye to Eye方式で取り付けられている場合にキャリブレーションを実行する方法について説明します。
|
詳細な説明については、 2台カメラのキャリブレーション(Eye to Eye) をご参照ください。 |
事前準備
以下は、ハンド・アイ・キャリブレーションを実行する前に必要な事前準備です。
-
Mech-Mindビジョンシステムを構築します。
-
キャリブレーションに必要なものを準備します。
-
キャリブレーションボードの点群画像生成を調整します。
-
ロボット通信設定を行います。
ビジョンシステムを構築
ビジョンシステムのハードウェア設置 を参照してMech-Mindビジョンシステムの構築を完了させてください。
ハンド・アイ・キャリブレーションを実行するには、Mech-Eye Viewer、Mech-VisionおよびMech-Vizの使用が必要です。これらのソフトウェアがインストールされ、最新バージョンにアップグレードされていることを確認してください。
キャリブレーションに必要なものを準備
Eye to Eye取り付け方式を使用する場合、キャリブレーションを実行するにはキャリブレーションボードの使用が必要です。キャリブレーションボードは以下の要件を満たす必要があります。
-
キャリブレーションボードの白い円がはっきりと見えること、破損や曲げ変形がないことを確認してください。
-
キャリブレーションボードのコネクタをロボット先端のフランジに取り付け、そのコネクタにキャリブレーションボードを取り付けます。キャリブレーションボードがしっかりと取り付けられていること、ロボット先端のXY平面と平行であることを確認してください。
ロボットフランジに取り外しができないハンドがある場合、キャリブレーションボードをハンドに直接固定します。
また、キャリブレーションを実行する前に、2つのカメラの視野が重なる領域の最下部中央をキャリブレーション開始位置として、ロボットを移動させます。
キャリブレーションボードの点群画像生成を調整
-
Mech-Eye Viewerを起動し、カメラパラメータを調整します。
-
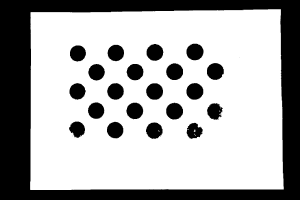
2D画像内のキャリブレーションボードがはっきり見え、露出過度や露出不足がないように、2Dパラメータを調整します。
-
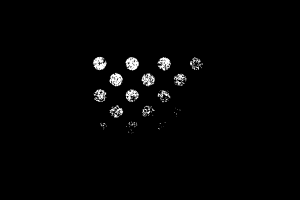
3Dパラメータを調整して、キャリブレーションボードの白い円の点群が完全に見られるようにします。点群の変動範囲を小さくするために、点群後処理の中の表面平滑化とノイズ除去をNormalに設定することを推奨します。
現場では、環境光が複雑な場合、2D画像や点群への影響を軽減するために、遮光・補光することを推奨します。
-
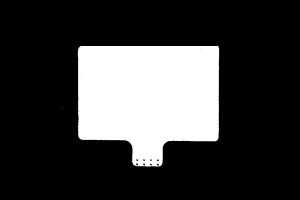
上記の手順を完了することで、キャリブレーションボードの点群の画像品質が要件を満たしていることを確認します。
正常 露出過度 露出不足 2D画像
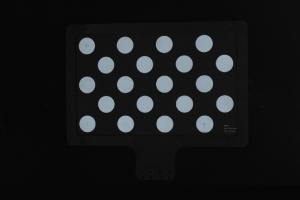
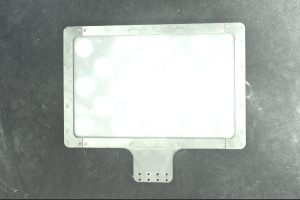

点群
キャリブレーション前の設定
ロボットが標準インターフェース通信またはVizティーチング通信に対応している場合、自動キャリブレーション(Eye to Hand)の キャリブレーション前の設定 を参照して設定を行います。
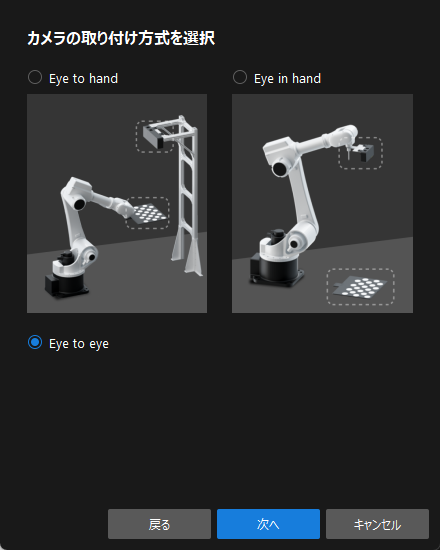
Eye to Eyeキャリブレーションを実行するには、 カメラの取り付け方式を選択 画面で Eye to eye を選択します。
ロボットが標準インターフェース通信またはVizティーチング通信に対応していない場合、標準キャリブレーション法を使用する手動キャリブレーション(Eye to Hand)の キャリブレーション前の設定 を参照して設定を行います。
その他のキャリブレーションフローと比較して、Eye to Eyeのキャリブレーション前の設定は、以下の手順が異なります。
-
カメラの取り付け方式を選択 画面で Eye to eye を選択します。
-
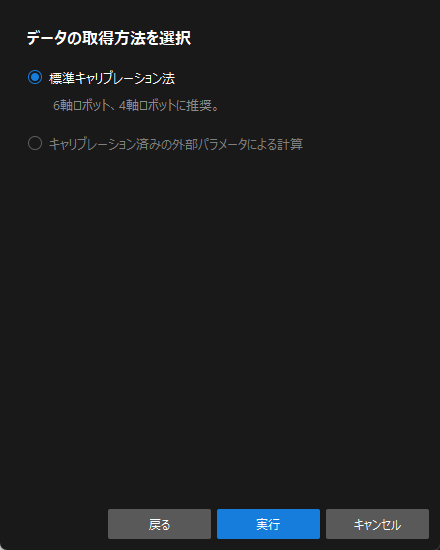
データの取得方法を選択 画面で、 標準キャリブレーション法 を選択します。
キャリブレーションの実行手順
カメラ接続
-
カメラに接続 手順で、 カメラ一覧 から接続するサブカメラを選択して
 をクリックするか、ダブルクリックして接続します。
をクリックするか、ダブルクリックして接続します。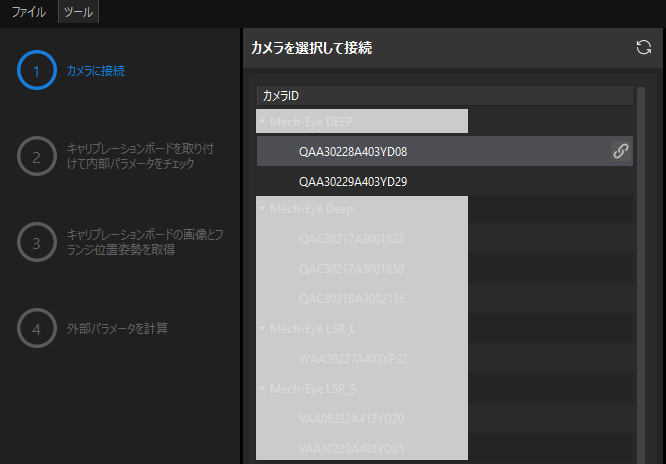
-
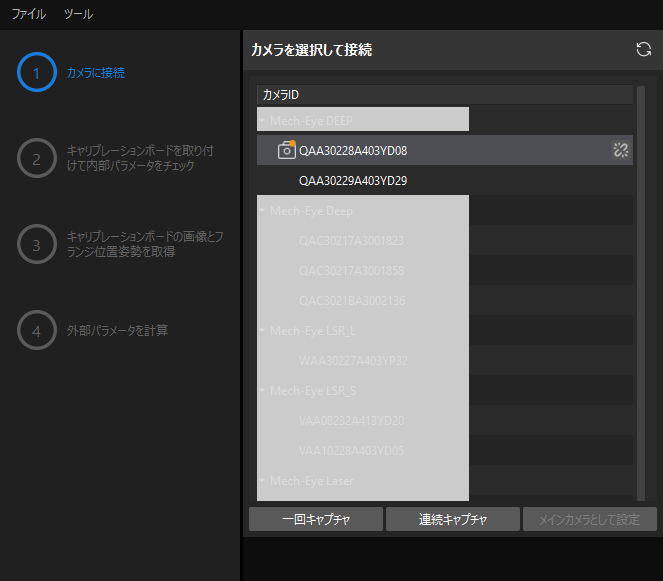
上記の方法と同様にメインカメラに接続します。接続後、カメラIDの前に
 が表示されます。
が表示されます。メインカメラを切り替えるには、カメラを選択し、メインカメラとして設定をクリックします。
-
カメラ接続後、 一回キャプチャ または 連続キャプチャ をクリックします。
-
画像ビュー では、カメラが画像を正常に取得できることを確認した上で 次へ をクリックします。
この手順では、メインカメラのみを使用して2D画像と深度画像を取得します。サブカメラの画像取得効果を確認するには、それをメインカメラに設定し、画像取得効果を確認してから元の設定に戻ります。
その他の手順
ロボットが標準インターフェース通信またはVizティーチング通信に対応している場合、自動キャリブレーション(Eye to Hand) を参照して残りの設定を行います。
ロボットが標準インターフェース通信またはVizティーチング通信に対応していない場合、 標準キャリブレーション法を使用する手動キャリブレーション(Eye to Hand) を参照して残りの設定を行います。
|
これで、キャリブレーション手順が完了しました。
キャリブレーション済みの外部パラメータによる2つのカメラの位置姿勢関係を計算
2つのカメラの外部パラメータを別々にキャリブレーションした後、ETEキャリブレーションで2つのカメラの位置姿勢関係を直接計算することができます。
キャリブレーション済みの外部パラメータで2つのカメラの位置姿勢関係を計算するには、以下の手順を実行します。
-
Mech-Visionを起動し、ツールバーの カメラキャリブレーション(標準モード) をクリックします。すると、 キャリブレーション前の設定 画面が表示されます。
-
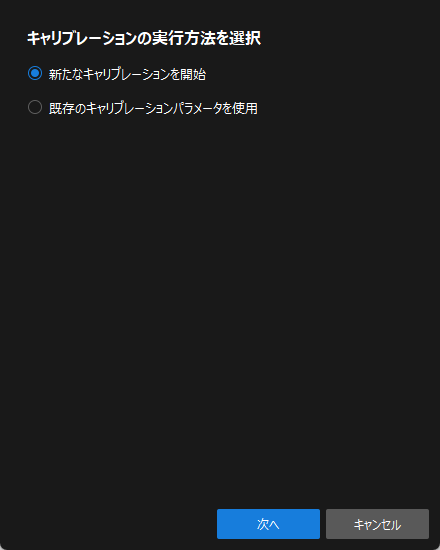
キャリブレーションの実行方法を選択 画面で、 新なキャリブレーションを開始 を選択し、 次へ をクリックします。
-
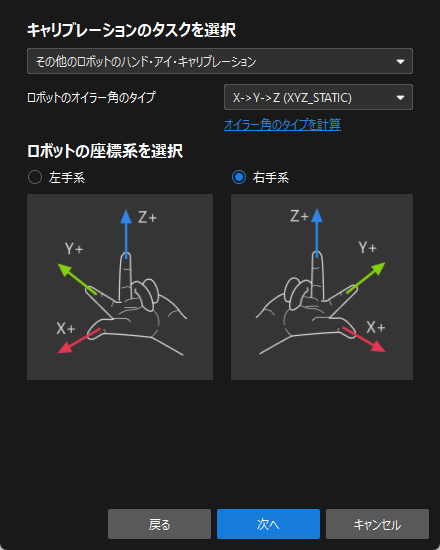
キャリブレーションのタスクを選択 画面で、ドロップダウンリストから その他のロボットのハンド・アイ・キャリブレーション を選択し、必要に応じて ロボットのオイラー角のタイプ を指定し、ロボットの座標系を選択してから 次へ をクリックします。
-
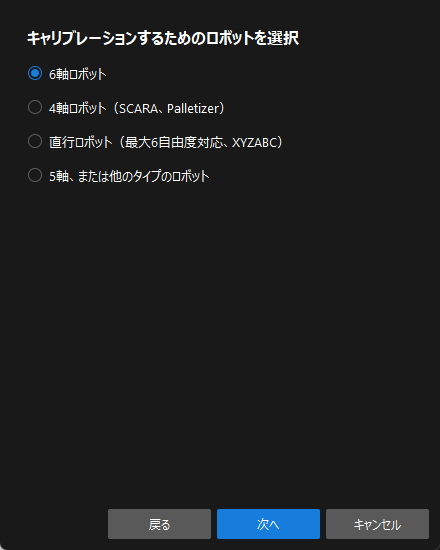
キャリブレーションするためのロボットを選択 画面で、実際の状況に応じて 6軸ロボット 、 4軸ロボット または 5軸、または他のタイプのロボット を選択してから、 次へ をクリックします。
-
カメラの取り付け方式を選択 画面で、 Eye to eye を選択して 次へ をクリックします。
-
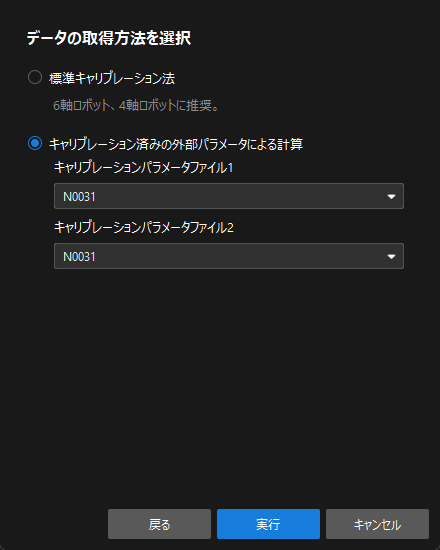
データの取得方法を選択 画面で、 キャリブレーション済みの外部パラメータによる計算 を選択し、2つのカメラの外部パラメータファイルを選択してから 実行 をクリックします。すると、 キャリブレーション(Eye to Eye) 画面が表示されます。
-
カメラに接続 手順で、カメラ一覧から接続するカメラを選択して
をクリックするか、ダブルクリックして接続します。 -
繰り返して2番目のカメラに接続してから、下の 次へ をクリックします。
-
外部パラメータを計算 手順で、 外部パラメータを計算 をクリックします。
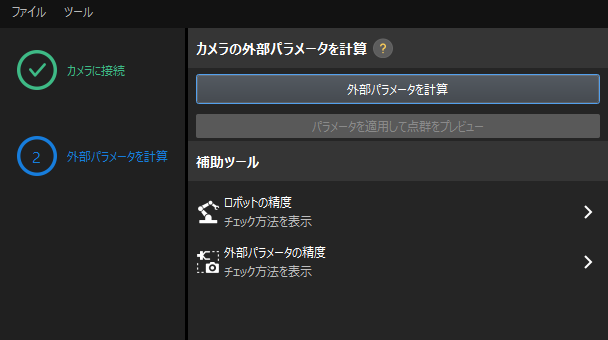
外部パラメータが計算した後、 点群ビュー パネルで融合された点群が表示されます。
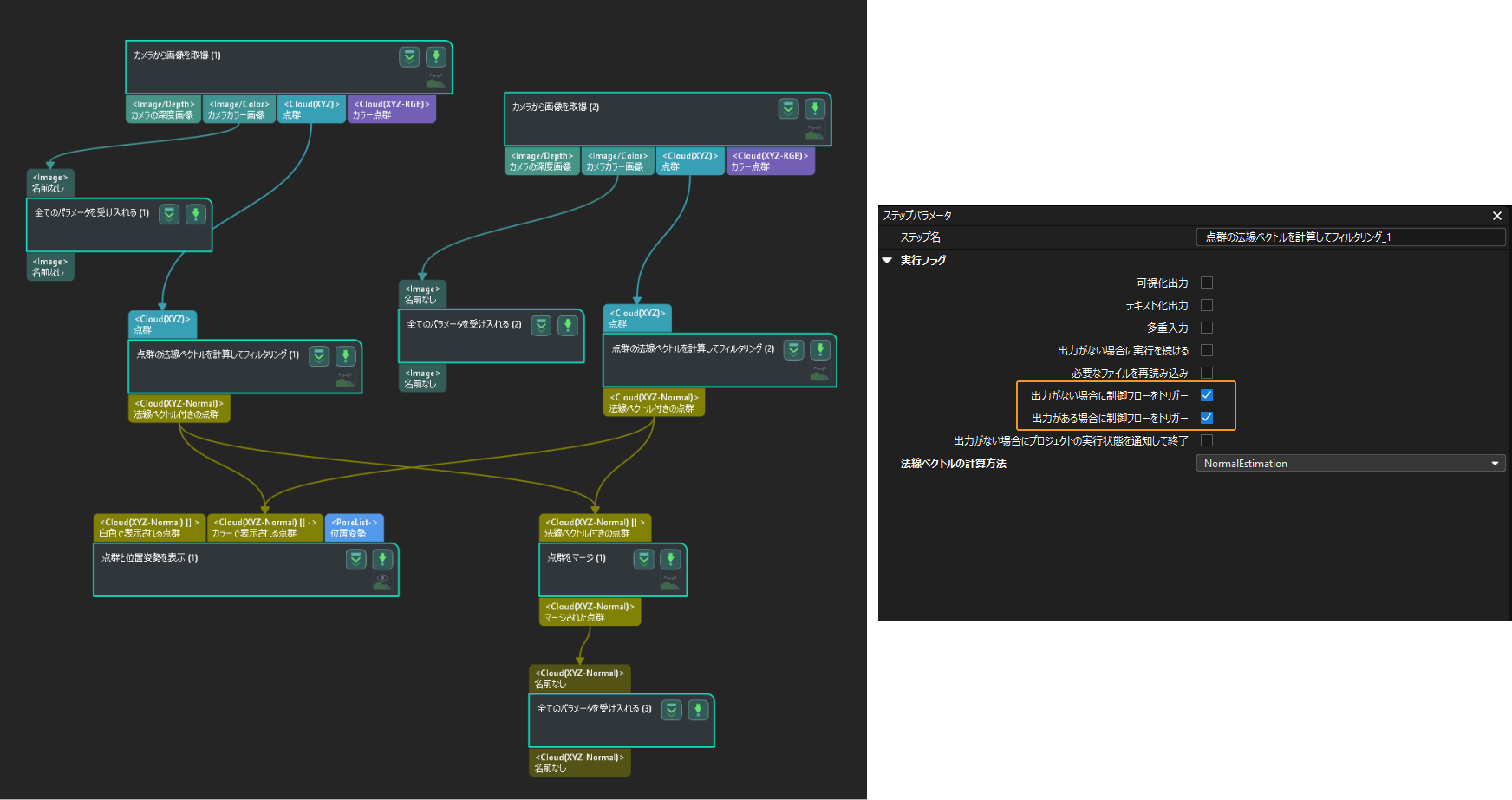
外部パラメータファイルの切替え
Mech-Visionプロジェクトがカメラの外部パラメータファイルを使用している場合、ハンド・アイ・キャリブレーションが完了したら、Mech-Visionプロジェクトに使用されている外部パラメータファイルを新しいものに切り替える必要があります。
-
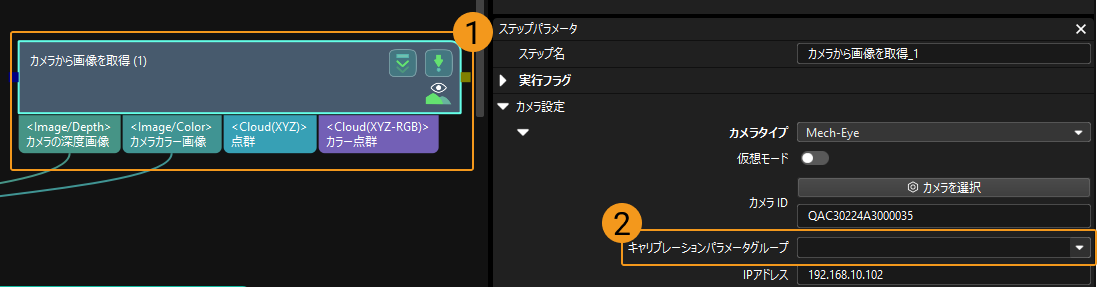
カメラから画像を取得 ステップを選択します。
-
ステップパラメータ から キャリブレーションパラメータグループ の
 をクリックし、表示される画面で新しい外部パラメータファイルを選択します。
をクリックし、表示される画面で新しい外部パラメータファイルを選択します。
キャリブレーションに関するステータスコード
ハンド・アイ・キャリブレーションを行う際、ロボットとビジョンシステムが標準インタフェースを使用して通信している場合、ビジョンシステムからのデータにはコマンドの実行状態を示すステータスコードが含まれます。このステータスコードには正常な実行完了および異常なアラートが含まれ、ステータスコードに基づいてエラー処理を行うことができます。