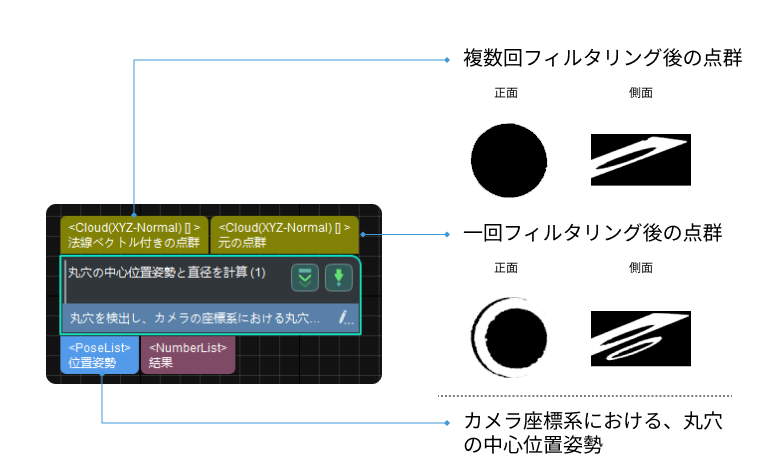
丸穴の中心位置姿勢と直径を計算
使用シーン
通常、 大型部品 の測定シーンに使用されます。前に 平面点群を抽出 をつなぎ、平面点群を取得します。後に 位置姿勢をカスタマイズされた座標系に変換 をつなぎ、基準座標系での位置姿勢を取得します。
パラメータの調整説明
円を検出して測定
- ROI
-
パラメータ説明:このパラメータは、ROIを設定し、丸穴の中心位置姿勢とサイズ情報を読み込むために使用されます。
調整アドバイス: 測定モード でROIを選択し、関心領域を正しく設定することをお勧めします。
|
関心領域を設定する時、円に近づけるようにする必要があります。関心領域が不正確な場合、生成された円の精度に影響を与える可能性があります。 |
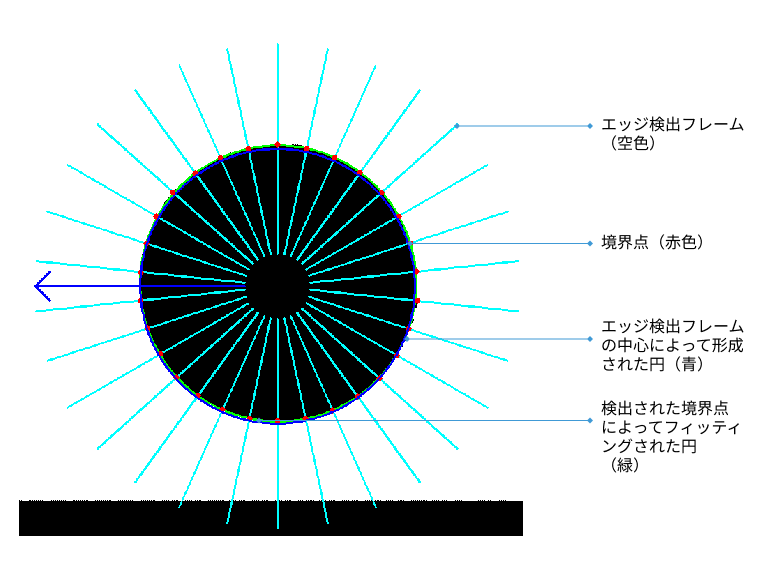
原理:下図に示すように、エッジ検出フレームは青い矢印に沿って黒と白の境界点を探し、そこから検出された境界点をフィッティングして円を生成します。そのため、エッジ検出フレームの数が多いほど境界点が多くなり、フィッティングされた円の精度が高くなります。エッジ検出フレームの高さの半分が円の中心に近いほど、検出可変範囲が大きくなり、前後の画像で円の位置が変化しても、正確な円を検出することができます。
-
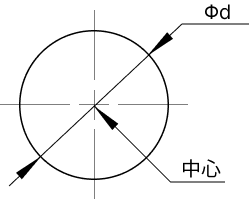
中心X / Y:読み取った円中心の座標です。
-
幅/高さ:読み取った円の実寸です(下図dに示す)。
-
角度:ROIを設定するための角度です。
- エッジ検出フレームの数
-
パラメータ説明:このパラメータは、円を生成するためのエッジ検出フレームの数を指定するために使用されます。値が高いほど、生成される円の精度が高くなり、計算時間が長くなります。
初期値:500
調整アドバイス:初期のパラメータ値では、円が要件を満たしている場合は適切に下げ、それ以外の場合は適切に上げます。
- エッジ検出フレームの高さの半分
-
パラメータ説明:このパラメータは、円を生成するためのエッジ検出フレームの高さを設定するために使用されます。エッジ検出フレームが円の中心に近いほど、検出の可変範囲が大きくなります。パラメータが大きいほど計算時間は長くなり、小さいほど計算時間は短くなります。この値が大きすぎると、同じエッジ検出フレームが円全体を通過することになり、その際に2つの交点を検出したり、円以外の残りの輪郭点を検出したりして、円のフィッティングが不正確になる可能性があります。
初期値:110
調整アドバイス:ROIが円全体を選択する場合(半円しかない場合は円全体を選択することができない)、この値を円の半径(ROIの幅/高さの半分から計算)に設定することを推奨します。円全体をフレームに収めることができない場合や、画像に他の境界線がある場合は、実測値に応じて設定することができます。
円柱以内の点群を抽出
|
このステップの組合せを実行すると、点群はカメラ座標系から点の基準座標系に変換されます。このパラメータグループ下のパラメータは、点の基準座標系に従って点のZ軸の範囲を設定します。 |
- 最小Z値:
-
パラメータ説明:このパラメータは、点の基準座標系におけるZ軸の下限(ミリメートル単位)を指定するために使用されます。値が小さいほど抽出される点は多くなり、値が大きいほど抽出される点は少なくなります。
初期値:-0.500mm
- 最大Z値:
-
パラメータ説明:このパラメータは、点の基準座標系におけるZ軸の上限(ミリメートル単位)を指定するために使用されます。値が小さいほど抽出される点は少なくなり、値が大きいほど抽出される点は多くなります。
初期値:0.500mm