点群変換(直行ロボット)
使用シーン
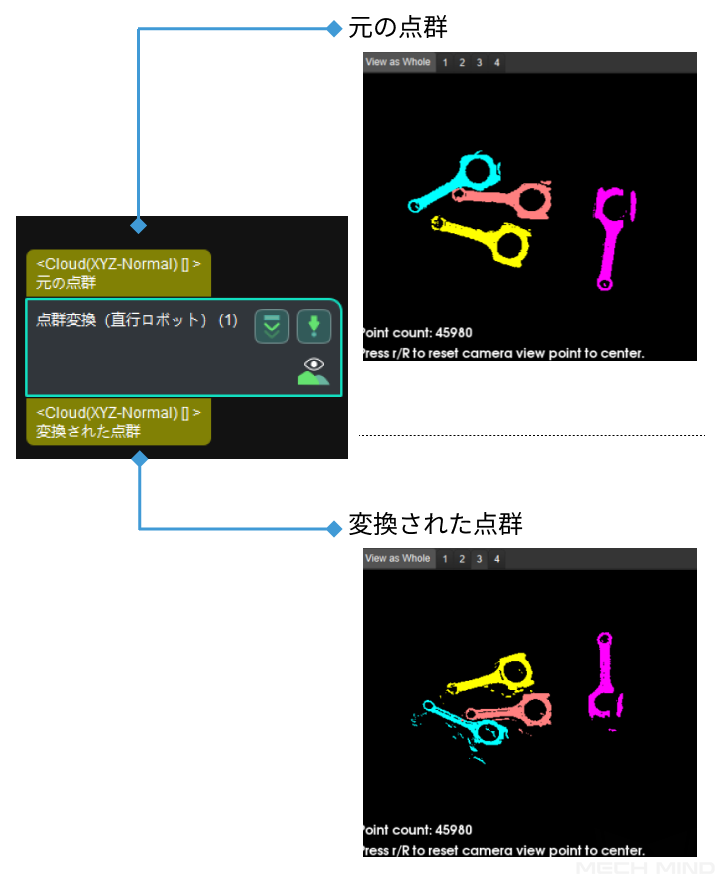
このステップは、直行ロボットを使用したプロジェクトに点群の座標系を変換するために使用されます。
|
プロジェクトに直行ロボット以外のロボットを使用している場合は、 点群変換 ステップを使用してください。 誤ったステップを選択した場合、変換された点群の位置が正しくなくなり、誤った把持位置姿勢が出力される可能性があります。 |
このステップは、直行ロボットを使用したプロジェクトに点群の座標系を変換するために使用されます。
|
プロジェクトに直行ロボット以外のロボットを使用している場合は、 点群変換 ステップを使用してください。 誤ったステップを選択した場合、変換された点群の位置が正しくなくなり、誤った把持位置姿勢が出力される可能性があります。 |