基本概念
プロジェクト
Mech-Viz で作成するロボット経路計画プロジェクトです。
Mech-Viz でプロジェクトに必要な設定を完了したら、このプロジェクトを使用してロボット経路を計画してロボットの動作を制御することができます。プロジェクトの設定は、プロジェクトと同名のフォルダに保存されます。
位置姿勢
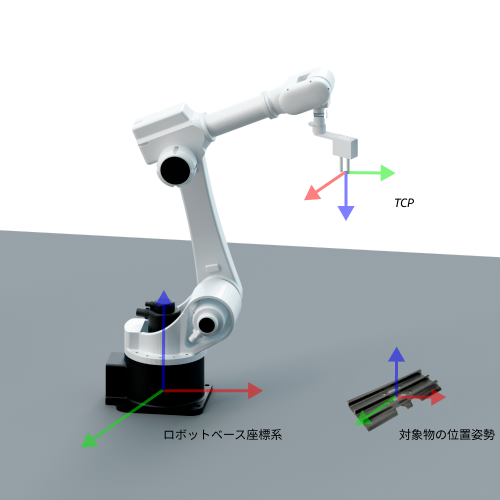
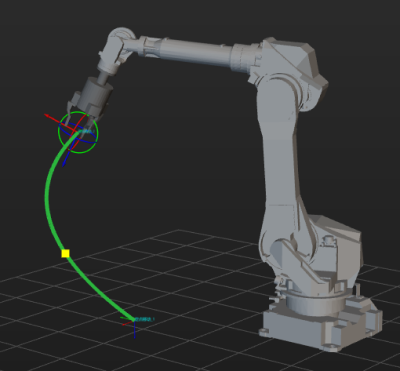
TCP(Tool Center Point、ツールセンターポイント)
ロボットハンド先端の点がロボットフランジに対する位置姿勢のことです。
対象物把持などを実行する場合、ロボットをある点に移動するのは、TCP をこの点に移動することです。
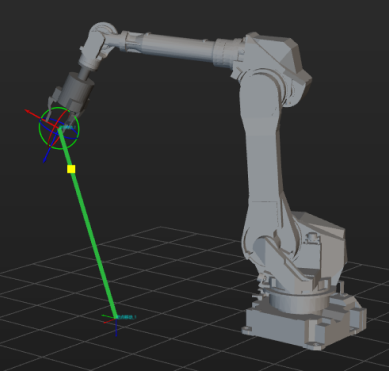
(対象物)把持点
対象物には複数の把持点があることがあります。把持点は Mech-Vision から取得されます。 対象物を把持する時、ロボットは TCP を把持点に移動させ、2つの点と X 軸を重なり合わせて Y・Z 軸の方向を逆にします。
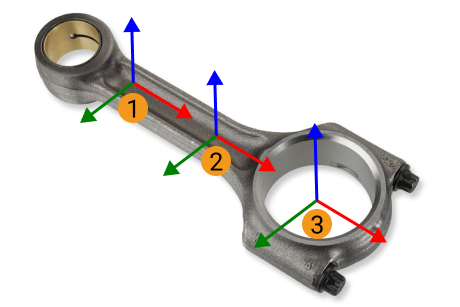
① と ②はリンクの把持点で ③ はリングの把持点です。
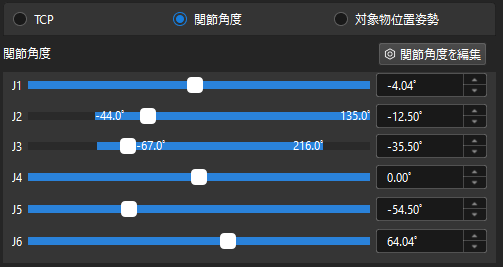
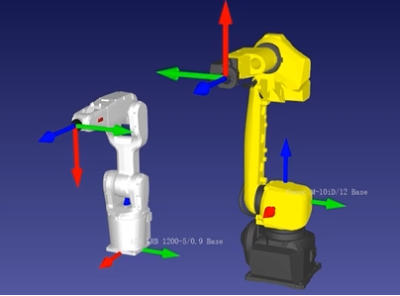
ロボット位置姿勢
ロボットが 3D 空間における位置の方向です。ロボットハンド位置姿勢または関節角度で表示します。
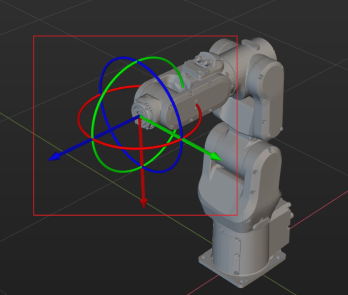
ロボットハンド位置姿勢
ロボットハンド座標系がロボットベース座標系に対する位置姿勢です。
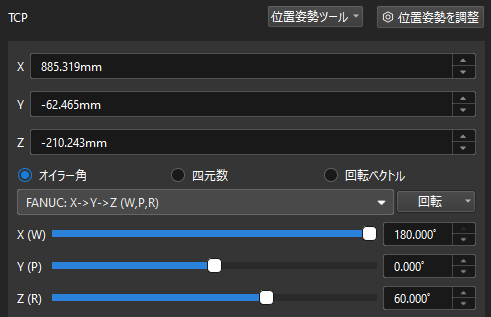
ロボットハンドの位置(x、y、z)と姿勢(オイラー角や四元数などで表示する)です。ロボット実機が運動する時ロボットハンドの位置と向きを示します。
-
オイラー角
オイラー角(Euler Angles)は、物体が 3D空間における回転を表示します。
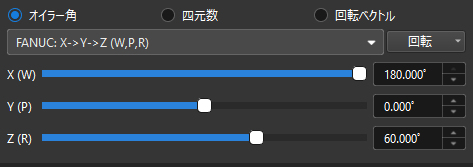
3つの角度で構成されており、それぞれ 3つの軸の回転に対応しています。3つの軸の回転は、対象物座標系の X、Y、Z 軸を中心とする回転です。 ロボットメーカーごとにオイラー角の表現方法は異なります。例えば、


-
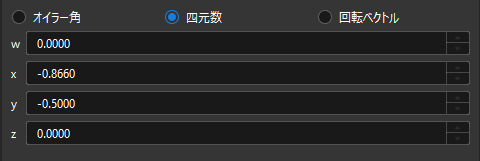
四元数
デッドロックを回避するために、一部のロボットメーカーは四元数を使用します。四元数は、3つの数値で空間の回転軸を定義し、1つの数値で回転角度を定義します。ロボットハンド座標系の初期状態からこの回転軸を中心にこの角度だけ回転させると目標姿勢に到達します。
-
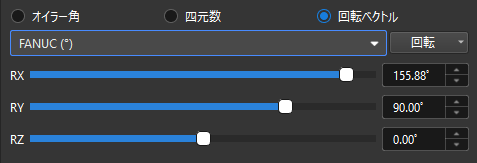
回転ベクトル
軸角度とも呼びます。ロボットハンドの回転を表現します。UR ロボットが使用しています。
対称性と把持範囲
対象物の把持範囲
対象物を把持できない場合でも、ロボットハンドの位置姿勢を一定角度の範囲内で微調整することで把持できる場合もあります。この範囲を把持範囲といいます。
詳しくは 対象物の把持範囲 をお読みください。