進入と調整
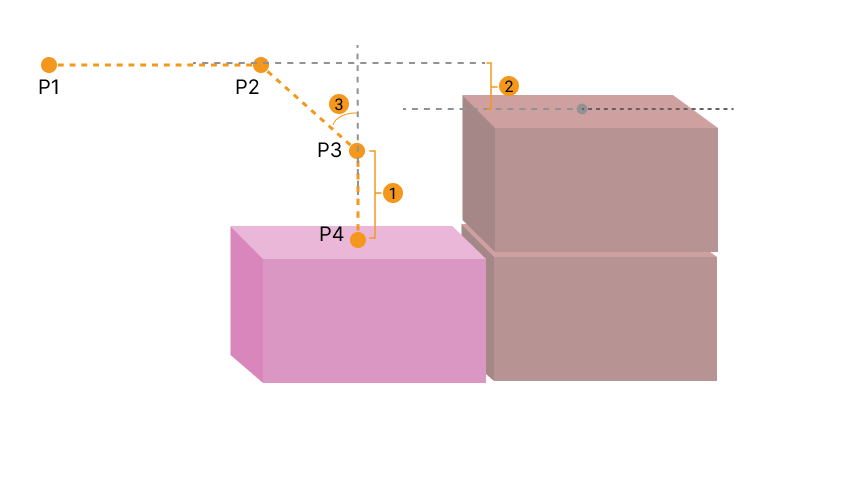
3つのパラメートを設定して箱がパレットに進入する経路を指定します。箱が配置済みの箱の山に近づいてから垂直方向に沿って配置するような進入経路を調整します。これによって他の箱との衝突を回避できます。
箱の配置位置は 4つあり、その内、進入点(P2)と調整点(P3)、配置点(P4)はこのパラメータによって決定されます。
|
1:垂直方向の長さの比例、2:垂直方向の範囲、3:Z方向の進入角度 |
| パラメータ | 説明 |
|---|---|
垂直方向の長さの比例 |
右図に示すように、垂直方向の長さの比例=垂直方向の長さ(1)/箱の高さ |
調整範囲: 0~1。推奨値: 50% |
|
垂直方向の範囲 |
右図の 2 に示す |
調整範囲: 0 以上。単位:mm。必要に応じて設定 |
|
Z 方向の進入角度 |
右図の 3 に示す |
調整範囲: -80°~80°。推奨値: 30°~45° 。 |
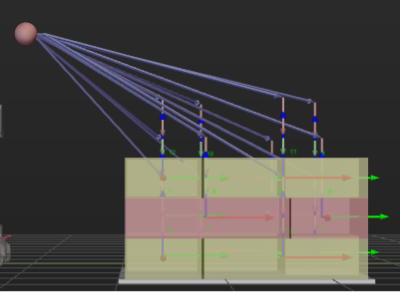
ビジョン処理によってパレットの位置を調整
「ビジョン処理によってパレットの位置を調整」をチェックし、「ビジョンサービス名」にパレットを認識するビジョンサービスを選択するとパレット位置を動的に調整できます。
このステップを実行する時、対応するビジョンサービスを実行してその結果に応じてパレットの位置を更新します。
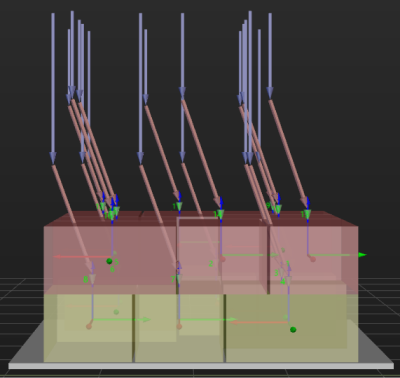
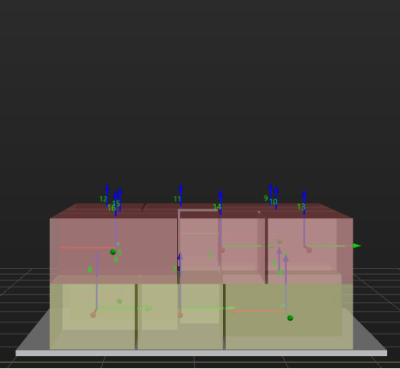
基本的な移動設定
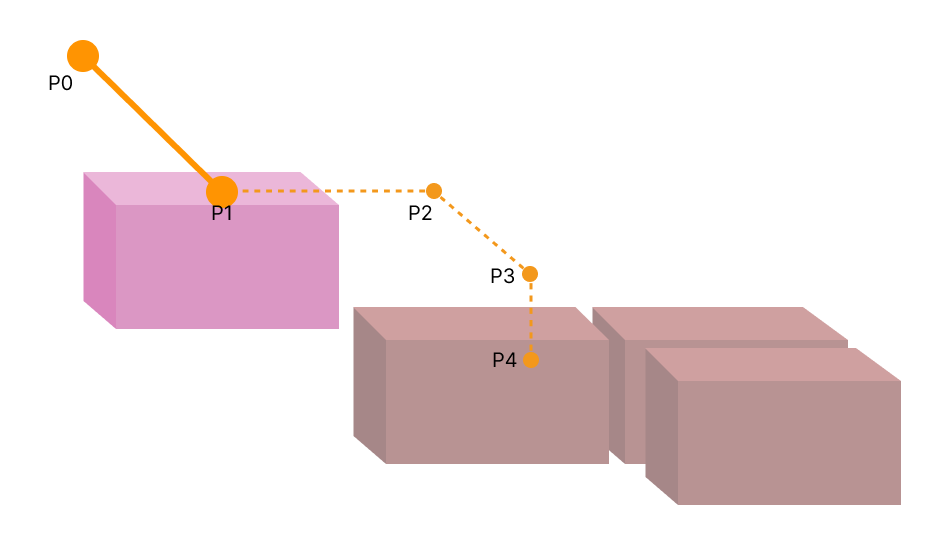
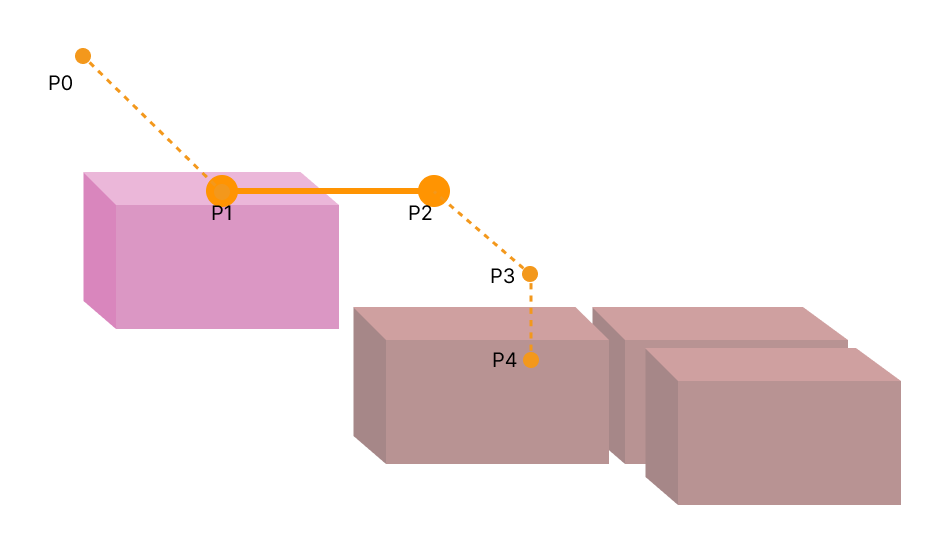
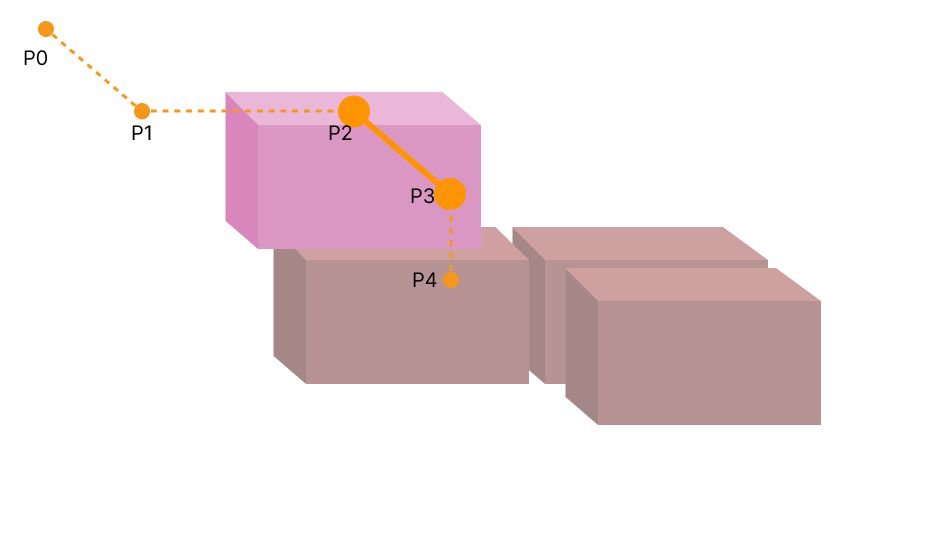
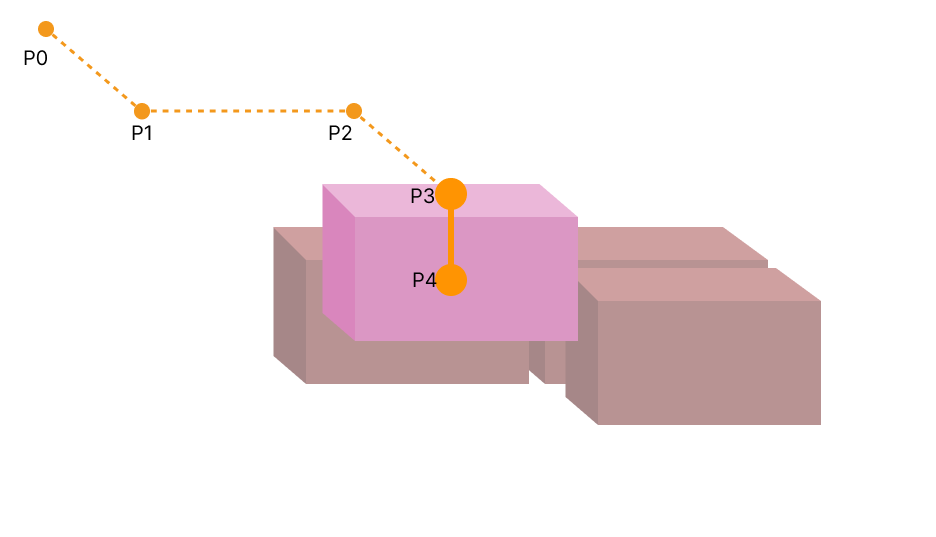
箱を配置する時の経路:
|
|
|
|
-
P0:基準点、P1:中間点、P2:進入点、P3:調整点、P4:配置点。
-
P0-P1:中間段階、P1-P2:進入段階、P2-P3:調整段階、P3-P4:配置段階。
運動タイプ
関節運動 |
ロボットが円弧に沿って走行します。スムーズに走行できるので特異点を回避することが可能。
|
直線運動 |
ロボットが直線に沿って走行します。
|
特異点回避
運動タイプが直線運動の場合、特異点回避機能を有効にすると複数のロボット関節が直線に沿って移動するようになり、特異点を回避できます。
詳細説明
| 移動区間数の制限 | 固定 | 制限なし |
|---|---|---|
機能 |
ユーザー指定の区間数に従って直線に沿って移動します。 |
移動する区間数を自動的に計算します。 |
アドバンテージ |
|
|
ディスアドバンテージ |
|
|
| パラメータ | 説明 |
|---|---|
移動区間数 |
移動区間数の制限を固定に設定すると、ユーザーが関節運動の区間数を指定することになります。 |
位置偏差の上限 |
直線運動の経路から外れる距離の最大許容値。 位置偏差の上限の値が高いほど特異点回避の成功率は高くなり、実際の移動経路は直線から外れるようになります。 |
角度偏差の上限 |
直線運動の経路から外れる角度の最大許容値。 角度偏差の上限の値が高いほど特異点回避の成功率は高くなり、実際の移動経路は直線から外れるようになります。 |
速度&加速度
速度&加速度は、ロボット動作のスピードを決定します。普通、加速度の値を速度より小さく設定します。加速度の値を速度よりも大きくしたらロボット動作がスムーズでなくなります。
| ロボットが安定に把持を実行するように、ビジョン処理による移動ステップとその前後のステップの運動速度を低く設定してください。 |
ブレンド半径
調整説明:通常、初期値を使用すればいいです。
-
レンド半径とは、回転する位置が目標点までの距離であり、大きいほどロボットの動きはスムーズになります。ロボットが狭いスペースで動作する場合、ブレンド半径を大きく設定する必要はありません。
-
ロボットがより広いスペースで動作し、障害物がなくて 2つの経路の間に距離が遠い場合、ロボットがスムーズに動くように、ブレンド半径を大きく設定することができます。