進入と調整
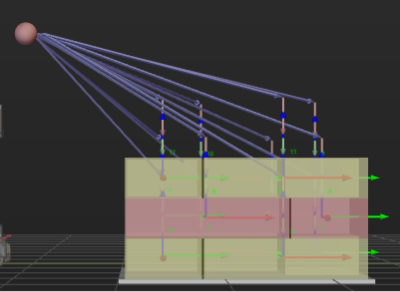
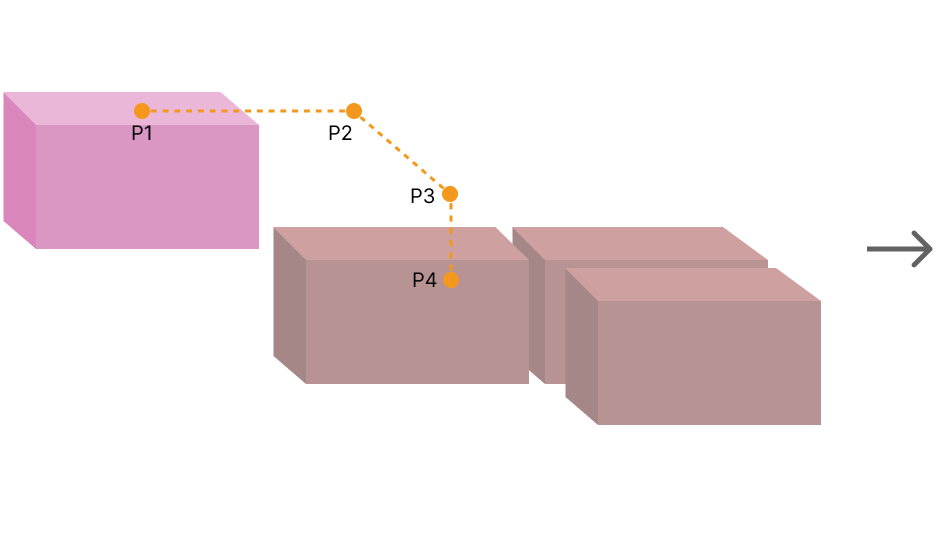
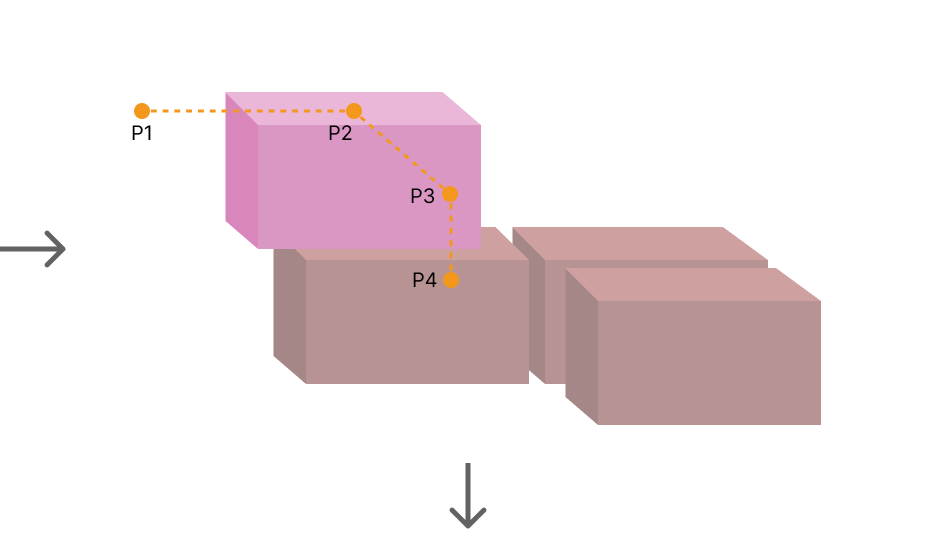
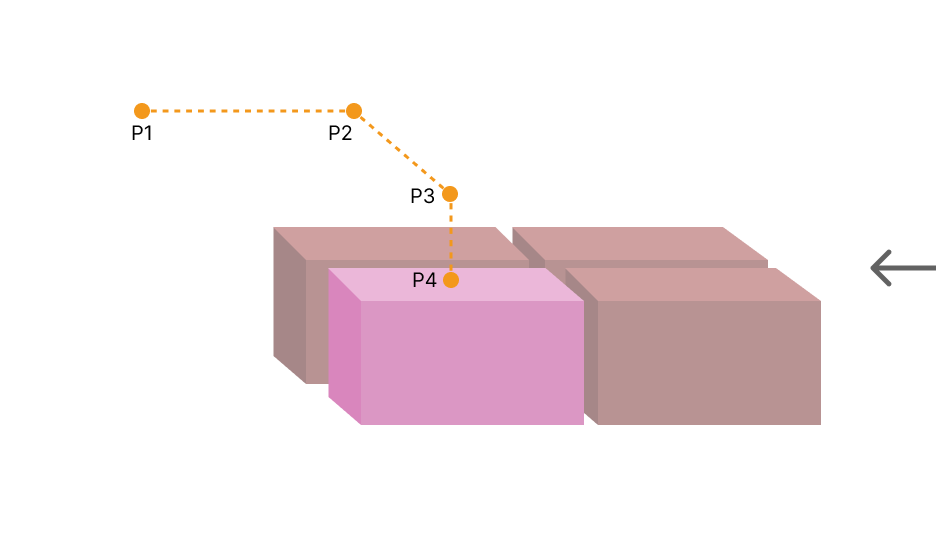
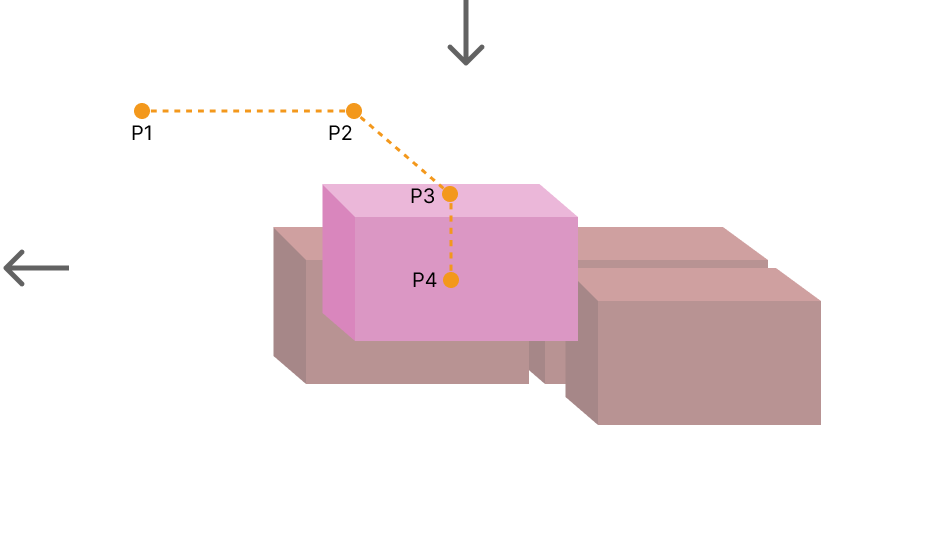
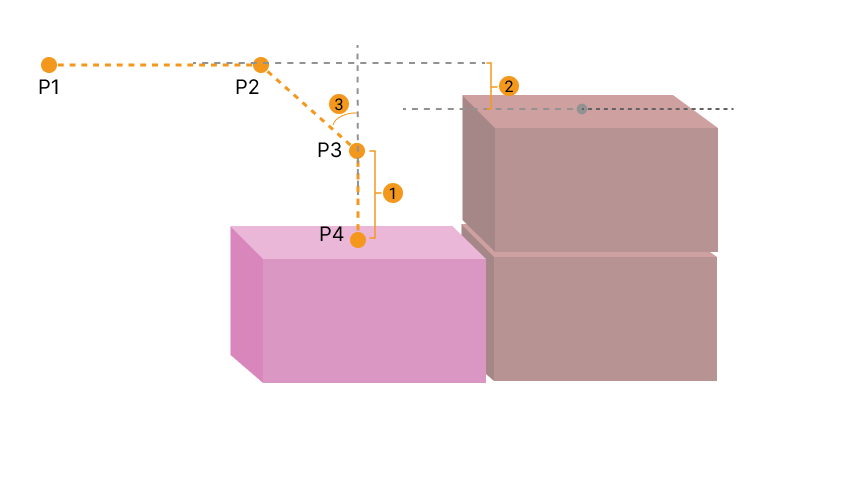
3つのパラメートを設定して箱がパレットに進入する経路を指定します。箱が配置済みの箱の山に近づいてから垂直方向に沿って配置するような進入経路を調整します。これによって他の箱との衝突を回避できます。
箱の配置位置は 4つあり、その内、進入点(P2)と調整点(P3)、配置点(P4)はこのパラメータによって決定されます。
|
1:垂直方向の長さの比例、2:垂直方向の範囲、3:Z方向の進入角度 |
| パラメータ | 説明 |
|---|---|
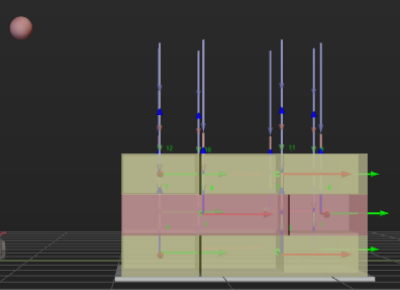
垂直方向の長さの比例 |
右図に示すように、垂直方向の長さの比例=垂直方向の長さ(1)/箱の高さ |
調整範囲: 0~1。推奨値: 50% |
|
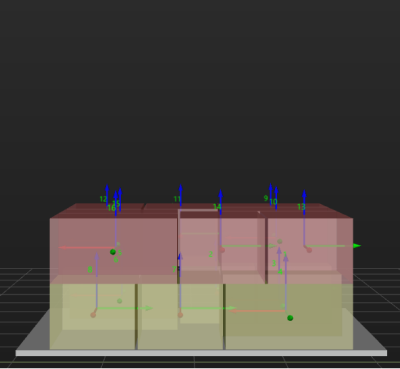
垂直方向の範囲 |
右図の 2 に示す |
調整範囲: 0 以上。単位:mm。必要に応じて設定 |
|
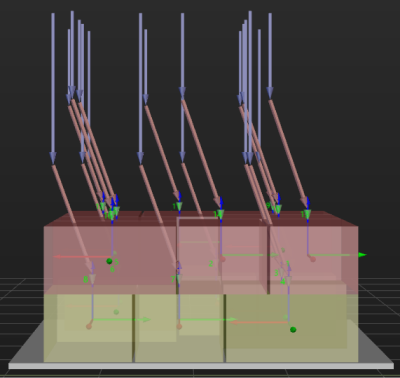
Z 方向の進入角度 |
右図の 3 に示す |
調整範囲: -80°~80°。推奨値: 30°~45° 。 |