動作制御
進入と調整
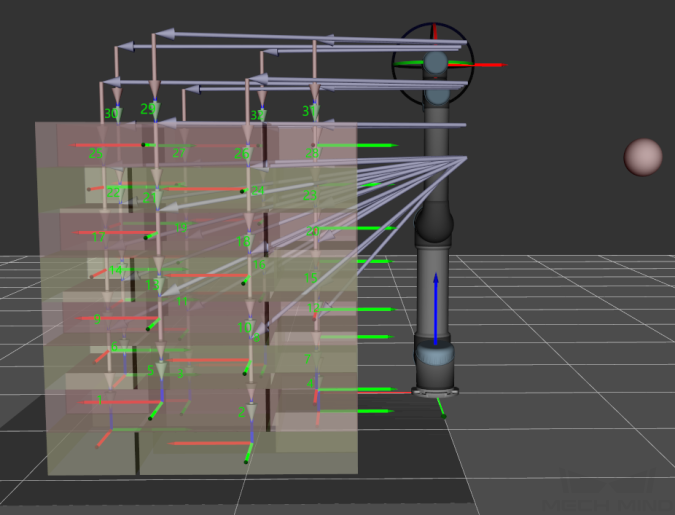
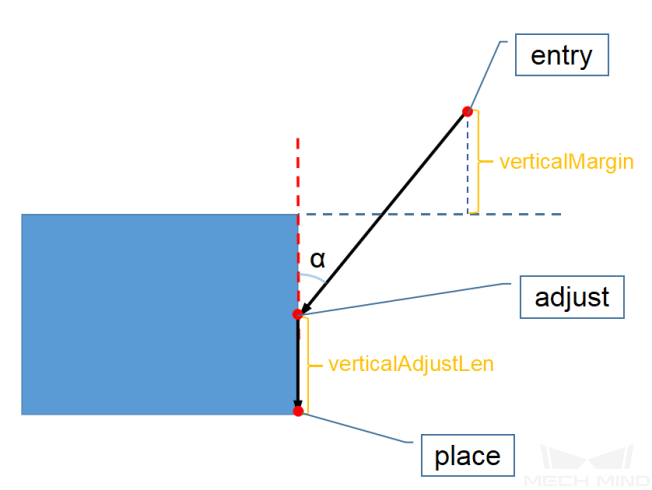
3つのパラメートを設定して箱がパレットに進入する経路を指定します。箱が配置済みの箱の山に近づいてから垂直方向に沿って配置するような進入経路を調整します。これによって他の箱との衝突を回避できます。
箱ごとに、パレットにエントリーするには4つの位置があり、そのうち 3つはこのパラメータグループによって制御されます。下図の赤い点に示すように、それらはentry、 adjust、およびplaceです。下図の画像の視点は、箱を配置する正面図です。
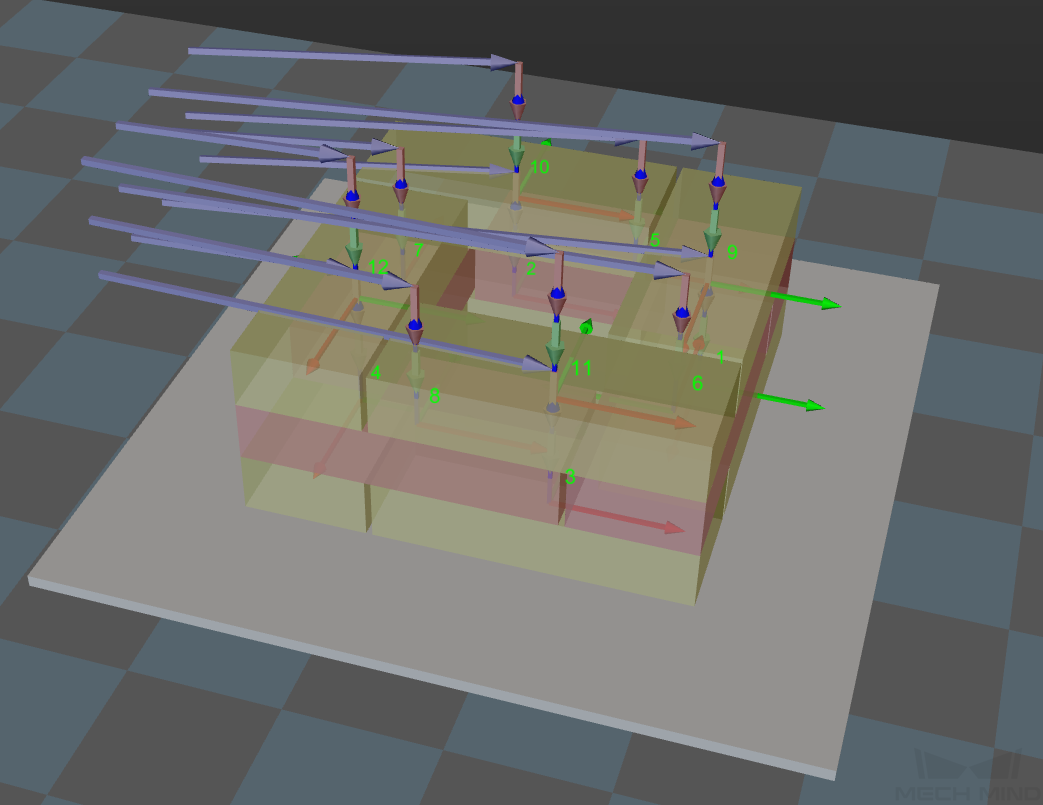
3つのパラメートを設定して箱がパレットに進入する経路を指定します。箱が配置済みの箱の山に近づいてから垂直方向に沿って配置するような進入経路を調整します。これによって他の箱との衝突を回避できます。
箱ごとに、パレットにエントリーするには4つの位置があり、そのうち 3つはこのパラメータグループによって制御されます。下図の赤い点に示すように、それらはentry、 adjust、およびplaceです。下図の画像の視点は、箱を配置する正面図です。