DO を設定
| 1.8.0 バージョンでは、「DO を設定」ステップと「DI リストを設定」ステップは新しい「DI を設定」ステップに統合されています。 |
機能
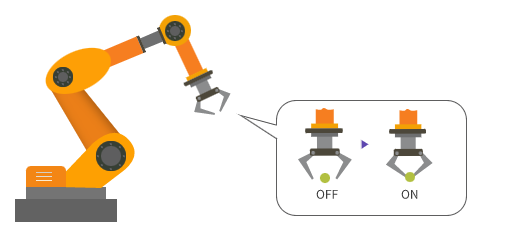
ロボット産業においては、「DO」とはデジタル入力信号を指します。デジタル出力信号は、オートメーションシステム内の機器またはコンポーネントを制御するために使用される電気信号です。デジタル出力信号はハイレベルまたはローレベルで表され、接続されたデバイスまたはアクチュエータを有効または無効にするために使用されます。デバイスとは、吸着ハンドやモーター、ソレノイドバルブ、リレー、表示灯、その他の種類の電気部品のことです。
このステップは、外部デバイスに信号を送信し、グリッパーの開閉、吸盤の開閉などの特定の動作を実行させます。また、コンベアベルトの制御やアラームのトリガーにも使用できます。
パラメータ説明
非移動ステップの共通パラメータ
実行をスキップ
| スキップしない |
初期値、このステップをスキップしません。 |
| シミュレーション時 |
シミュレーションを実行する時にこのステップをスキップします。出口は スキップ時の出口のインデックス によって決定されます。 |
| いつも |
シミュレーション時も実際に実行中にも実行をスキップします。出口は スキップ時の出口のインデックス によって決定されます。 |
| 調整説明 |
シミュレーション時 または いつも に設定すると、プロジェクト実行中にこのステップをスキップして後のステップを実行します。プロジェクトに「DI をチェック」ステップを配置したら、シミュレーション時に外部信号がなく、実行をスキップしなければプロジェクトの実行はここで停止することになります。このパラメータを設定すると、このステップを実行せずに次のステップを実行してシミュレーションを完了します。 |
スキップ時の出口のインデックス
実行をスキップ を シミュレーション時 または いつも に設定すれば有効になります。このパラメータは、スキップしてから実行する出口を指定します。
移動の完全な到達を待つ
デフォルトでチェックが入っています。ロボットが「DO を設定」ステップの前の移動ステップの経路点に到達してからこのステップを実行します。
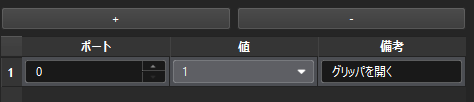
受信者
DO 信号を受信するデバイスに応じてこのパラメータを設定します。「ロボット」、「標準インターフェイス」、「Adapter」を選択できます(「Adapter」を選択した場合に「Adapter名」を入力してください)。複数選択は可能です。
| このパラメータを設定しなければ、DO 信号を送信できません。 |