カメラ取り付けスタンドの設計
カメラスタンドの種類
異なるカメラ取り付け方式には異なる取り付けスタンドが使用されます。詳細は下表を示します。
Eye to Hand 取り付けスタンド |
アルミニウム製スタンド
|
|---|---|
Eye in Hand 取り付けスタンド |
カメラがロボットのJ6軸フランジより高い
|
各種取り付けスタンドの設計要件と適用シーンの詳細については、 取り付けスタンドの設計と取り付け(Eye to hand) と 取り付けスタンドの設計と取り付け(Eye in hand) をご参照ください。
取り付けスタンドの設計と取り付け(Eye to hand)
| Eye to Hand 取り付けスタンドを設計する際には、カメラケーブルの配線を容易にするために、支柱の表面にケーブルトレイを配置する必要があります。 |
角形鋼管製スタンド(推奨)
それを使用する際は、溶接には国際標準の中空角形鋼管を選択する必要があります。中空角形は高い強度と安定性を備え、安定したサポートを提供できます。実際の状況に応じて単一支柱式または門形を選択できます。詳細は以下の通りです。
-
単一支柱式
外部からの影響や変動が少ない環境に適しています。構造がシンプルで取り付けが容易です。
設計要件:
-
角形鋼管の仕様は100*100*5以上である必要があります。
-
一体型の溶接が推奨されます。
-
カメラの取り付けスタンドの横梁と柱には、必要な対角ブレースとリブを備える必要があります。
-
-
門形スタンド
激しい振動がある環境に適しています。門形スタンドはより強力なサポートを提供し、外部の振動や衝撃に対してより良い安定性を確保できます。

スライド式スタンド
隣接するパレットは同じカメラを共有する場合に適しています。
スライド式スタンドは、 異なるパワーコンポーネント に基づいて、サーボモジュール型と空気圧シリンダー型に分けられています。
-
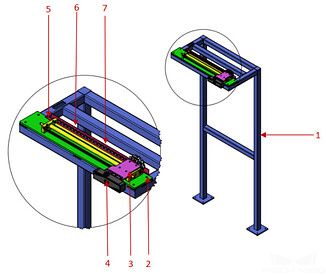
サーボモジュール型
サーボモジュール型スタンドは、スムーズな動作、衝撃のない停止および起動が求められ、通常の動作速度は250mm/s以下を推奨します。サーボモジュール型スタンドの構成要素を下図に示します:1-スタンド本体、2-モジュール取り付けボード、3-カメラ取り付けボード、4-カメラ、5-サーボモジュール、6-ドラッグチェーン取り付けボード、7-ドラッグチェーン。
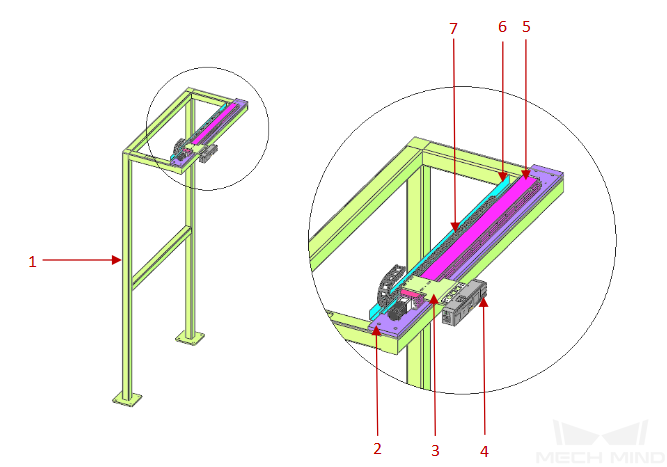
スタンド本体: 100*100の角形鋼管を溶接して作られています。スタンドが高い場合は、対角ブレースを追加するか、他の固定方法を使用することができます。 モジュール取り付けボードおよびカメラ取り付けボード: サーボモジュールが作動しているときにカメラの安定性を確保するためには、高い強度と剛性が求められます。 サーボモジュール: サーボモジュールの繰り返し位置決め精度は一般に±0.01mm、±0.02mm、±0.05mm、±0.1mm、±0.2mmなどがあります。実際のプロジェクトの精度要件に基づいて適切なサーボモジュールを選択することができます。駆動部分にはサーボモーターの使用が推奨されています。 ドラッグチェーン: バスケーブルの直径に基づいて標準的な市販部品を選択してください。一般的には、バスケーブルがドラッグチェーンの内部容積の60%から80%未満を占めるべきです。 ドラッグチェーン取り付けボード: 要件に応じてシートメタルの曲げ加工によって製作されます。
-
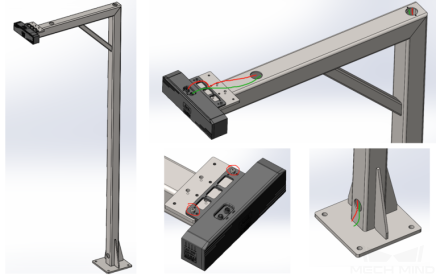
空気圧シリンダー型(非推奨)
空気圧シリンダーの位置決め精度はサーボモジュールよりわずかに低く、通常の精度は±0.1mmです。空気圧シリンダー型スタンドは、スムーズな動作、衝撃のない停止および起動が求められ、通常の動作速度は200mm/s以下を推奨します。空気圧シリンダー型スタンドの構成要素を下図に示します:1-スタンド本体、2-シリンダー取り付けボード、3-カメラ取り付けボード、4-カメラ、5-シリンダー、6-ドラッグチェーン取り付けボード、7-ドラッグチェーン。
空気圧シリンダー:現場のパレットの実際の距離に基づいてシリンダーのストロークを選択してください。ガイド付シリンダーを選択することをお勧めします。それ以外の場合は、リニアガイドと併用する必要があります。また、空気圧シリンダーはオイルバッファおよびリミットブロックと併用する必要があります。さらに、排気バルブを備える必要があります。スタンド本体、空気圧シリンダー取り付けボード、ドラッグチェーン取り付けボード、およびドラッグチェーンの設計および選択方法については、サーボモジュール型の説明をご参照ください。
空気圧シリンダーの影響、全体の精度、ドッキング位置でのカメラの振動、および長期の安定性などの要因を考慮して、この方法は非推奨です。
垂直可動式スタンド
パレットパターンが高い、長さまたは幅の寸法が大きい、およびパレット下層の麻袋の点群品質が低い場合に適しています。
垂直可動式スタンドは、駆動力によって異なり、空気圧垂直可動型と電動垂直可動型に分かれます。
-
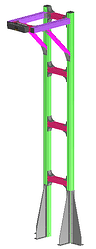
電動垂直可動型
カメラ取り付けスタンドはスムーズに動作し、動作中には激しい衝撃がないようにする必要があります。移動速度は250mm/s未満で、可動部品はスムーズかつ安定して動作します。また、カメラ取り付けスタンドは十分な剛性を持ち、動作中に振動が発生しないように保証する必要があります。電動垂直可動型スタンドの構成要素を下図に示します:1-スタンド本体、2-3Dカメラ、3-カメラ取り付けボード、4-ラックギア、5-ドラッグチェーン、6-ドラッグチェーン取り付けボード。
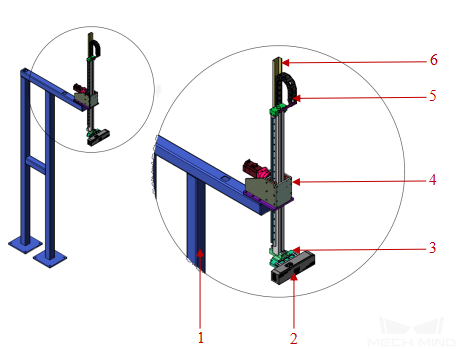
ラックギア:予期せぬ停電後、カメラが自由落下してしまうことを防ぐために、ブレーキモーターを選択することが推奨されます。
-
空気圧垂直可動型(非推奨)
設計要件:カメラ取り付けスタンドはスムーズに動作し、動作中に激しい衝撃がないようにする必要があります。移動速度は200mm/s未満で、可動部品はスムーズかつ安定して動作します。また、カメラ取り付けスタンドは十分な剛性を持ち、動作中に振動が発生しないように保証する必要があります。空気圧垂直可動型スタンドの構成要素を下図に示します:1-スタンド本体、2-カメラ取り付けボード、3-3Dカメラ、4-ドラッグチェーン、5-ロッドレスシリンダー、および6-ドラッグチェーン取り付けボード。
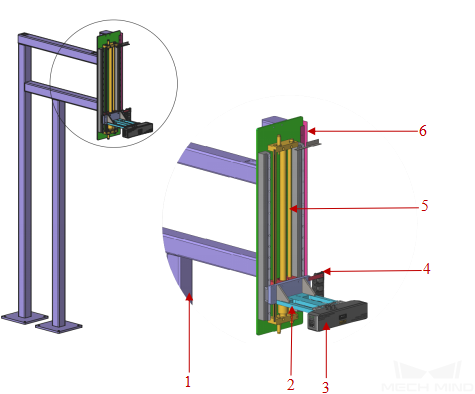
空気圧シリンダー:現場のパレットの実際の距離に基づいてシリンダーのストロークを選択してください。また、空気圧シリンダーはオイルバッファおよびリミットブロック、排気バルブを備える必要があります。空気圧シリンダーには中封式の方向制御弁を選択してください。これにより、エアが遮断された後もカメラが自由落下するのを防ぎます。
空気圧シリンダーの影響、全体の精度、ドッキング位置でのカメラの振動、および長期の安定性などの要因を考慮して、この方法は非推奨です。
取り付けスタンドの設計と取り付け(Eye in hand)
以下では、Eye in hand 取り付けスタンドの一般的な2つの設計形式を説明します。
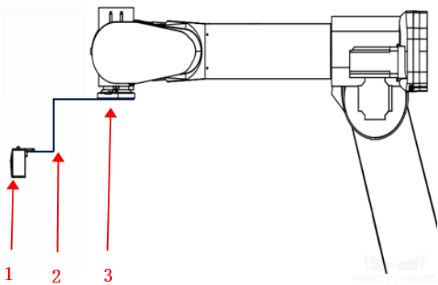
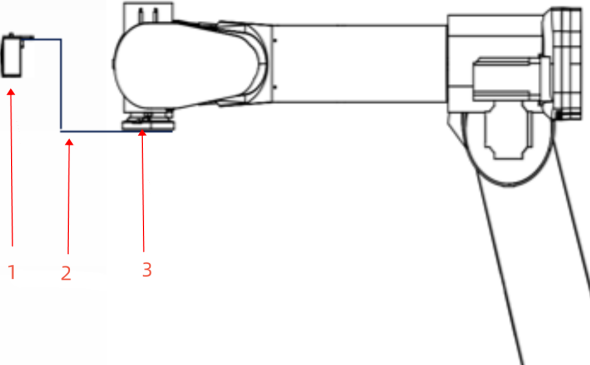
カメラがロボットのJ6軸フランジより高い
-
メリット:ロボットのアームが短い場合、カメラを高く配置して視野を広げることができます。
-
デメリット:ロボットのJ6軸の回転範囲が制限され、カメラスタンドまたはカメラとロボット本体が干渉する可能性があります。
構造図:1-カメラ、2-カメラスタンド、3-ロボットのJ6軸フランジ
カメラがロボットのJ6軸フランジより低い
-
メリット:ロボットのJ6軸の回転は、カメラまたはカメラスタンドの影響を受けません。
-
デメリット:ロボットが同じ高さに持ち上げられる場合、カメラの撮影高さが低く、視野が狭くなります。
構造図:1-カメラ、2-カメラスタンド、3-ロボットのJ6軸フランジ