3D位置姿勢低精度推定(V2)
使用シーン
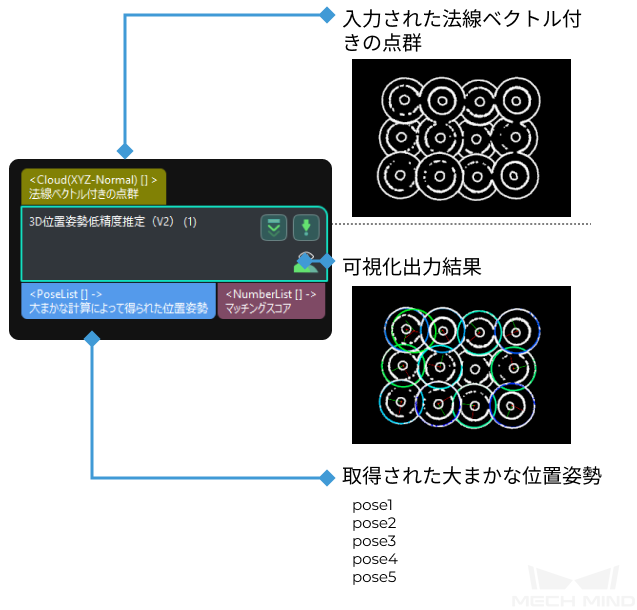
通常、シーンの点群に対象物を見つけてその大まかな候補位置姿勢を取得するために使用されます。このステップは通常、ステップ 3D位置姿勢高精度推定 と併用されます。
パラメータの説明
パラメータのデバッグレベル
パラメータ説明:このパラメータは、ステップパラメータの調整レベルを選択するために使用されます。
初期値:基本設定
基本設定
モデル設定
- モデル選択
-
パラメータ説明:このパラメータは、モデルライブラリ( プロジェクトフォルダ/resource/3d_matching )から点群モデルファイルを選択するために使用されます。
調整説明: マッチングモデル・把持位置姿勢エディタ で点群モデルを作成したら、このパラメータの右側にあるドロップダウンボタンをクリックすると、点群モデルファイルを素早く選択・切り替えできます。
- マッチングモード
-
パラメータ説明:このパラメータは、マッチングモードを選択するために使用されます。
オプション:エッジマッチング、サーフェスマッチング。
初期値:エッジマッチング。
調整説明:点群モデルに応じて選択する必要があります。点群モデルがワークのエッジモデルとして作成する場合、 エッジマッチング を選択してください。点群モデルがワークのサーフェスモデルとして作成する場合、 サーフェスマッチング を選択してください。
前処理設定
- サンプリングされたモデルの期待点数
-
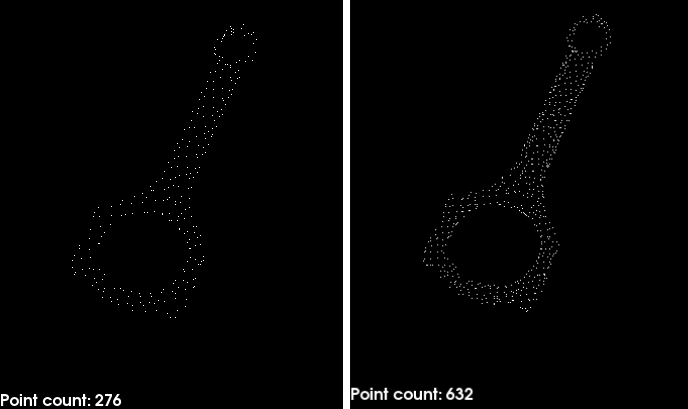
パラメータ説明:このパラメータは、ダウンサンプリング後の点群の点数を設定するために使用されます。値が小さいほど、サンプリングされた点群内の点が少なくなり、マッチングの精度が低くなります。
初期値:200
調整アドバイス:実際の状況に応じて設定してくだい。調整効果を 調整の例 に示します。
- サンプリング後の入力点群の点の最大数
-
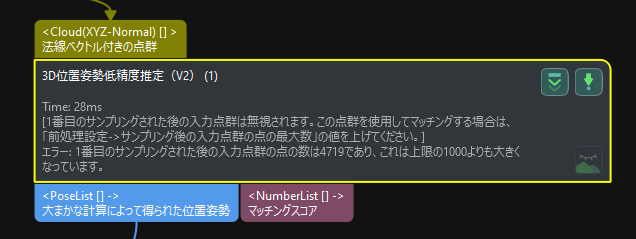
パラメータ説明:このパラメータは、ダウンサンプリング後のシーンにおける点群の最大点数を設定するために使用されます。ダウンサンプリング後のシーン点群の点数がこの値より多い場合、点群は無視され、空のデータが出力されます。
初期値:100000
調整アドバイス:実際の状況に応じて設定してくだい。調整効果を 調整の例 に示します。
位置姿勢検証設定
- 単一点群の結果の期待数
-
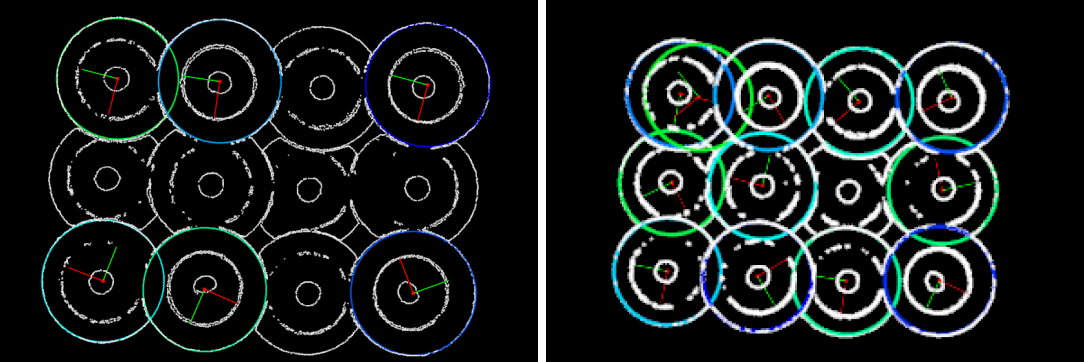
パラメータ説明:このパラメータは、各入力点群のマッチング位置姿勢の期待数を示します。
初期値:3
調整アドバイス:実際の状況に応じて設定してくだい。調整効果を 調整の例 に示します。
詳細設定
モデル設定
- モデル選択
-
パラメータ説明:このパラメータは、モデルライブラリ( プロジェクトフォルダ/resource/3d_matching )から点群モデルファイルを選択するために使用されます。
調整説明: マッチングモデル・把持位置姿勢エディタ で点群モデルを作成したら、このパラメータの右側にあるドロップダウンボタンをクリックすると、点群モデルファイルを素早く選択・切り替えできます。
- モデルファイル
-
パラメータ説明:このパラメータは、点群モデルファイルを選択するために使用されます。
調整説明:
 をクリックして、ply形式のモデル点群ファイルを選択します。
をクリックして、ply形式のモデル点群ファイルを選択します。 - 幾何学的中心ファイル
-
パラメータ説明:このパラメータは、幾何学的中心ファイルを選択するために使用されます。
調整説明:
をクリックして、json形式の幾何学的中心ファイルを選択します。
マッチングモード
パラメータ説明:このパラメータは、マッチングモードを選択するために使用されます。
オプション:エッジマッチング、サーフェスマッチング。
初期値:エッジマッチング。
調整説明:点群モデルに応じて選択する必要があります。点群モデルがワークのエッジモデルとして作成する場合、 エッジマッチング を選択してください。点群モデルがワークのサーフェスモデルとして作成する場合、 サーフェスマッチング を選択してください。
前処理設定
- サンプリングされたモデルの期待点数
-
パラメータ説明:このパラメータは、ダウンサンプリング後の点群の点数を設定するために使用されます。値が小さいほど、サンプリングされた点群内の点が少なくなり、マッチングの精度が低くなります。
設定可能な範囲:20~3000
初期値:200
調整アドバイス:実際の状況に応じて設定してくだい。調整効果を 調整の例 に示します。
- サンプリング後の入力点群の点の最大数
-
パラメータ説明:このパラメータは、ダウンサンプリング後のシーンにおける点群の最大点数を設定するために使用されます。ダウンサンプリング後のシーン点群の点数がこの値より多い場合、点群は無視され、空のデータが出力されます。
設定可能な範囲:100~100000
初期値:100000
調整アドバイス:実際の状況に応じて設定してくだい。調整効果を 調整の例 に示します。
- 近傍点の数
-
パラメータ説明:このパラメータは、点の方向における近傍点の数を設定するために使用されます。
設定可能な範囲:1~100
初期値:30
投票設定
- 単一特徴に含むポイントペアの最大数
-
パラメータ説明:このパラメータは、モデル分析に各特徴に含むポイントペアの最大数を示します。値が小さいほど実行は速くなりますが、精度は低くなります。
初期値:50
- 距離の定量化
-
パラメータ説明:このパラメータは、点間の距離を定量化するために使用されます(距離間隔 = 距離定量化 × サンプリング間隔)。値が大きいほど距離間隔が大きくなり、マッチング精度が低下します。
初期値:1.0000
- 角度の定量化
-
パラメータ説明:このパラメータは、点の特徴法線ベクトル間の角度を定量化するために使用されます(角度間隔 = 360° / 角度定量化)。値が大きいほど角度間隔が小さくなり、マッチング精度が高くなりますが、より高精度の点群が必要になります。
初期値:60
- 最大投票率
-
パラメータ説明:スコアは「投票での最高スコア × 最大投票率」より高い位置姿勢は位置姿勢の検証に使用されます。値が低いほど、位置姿勢の検証に使用される位置姿勢が多くなり、正確なマッチングを見つける可能性が高くなりますが、実行時間は長くなります。
初期値:0.80
- 参考点のサンプリングステップサイズ
-
パラメータ説明:このパラメータは、参考点のステップサイズを調整するために使用されます。点群では、このステップサイズを間隔としてサンプリングします。値が大きいほどサンプリングされた点の数が少なくなり、実行速度は速くなりますが、マッチング精度は低下します。
初期値:5
- 参考される点のサンプリングステップサイズ
-
パラメータ説明:このパラメータは、参考される点のサンプリングステップサイズを調整するために使用されます。点群では、このステップサイズを間隔としてサンプリングします。値が大きいほどサンプリングされた点の数が少なくなり、実行速度は速くなりますが、マッチング精度は低下します。
初期値:1
参考点と参考される点は、ポイントペアを形成します。サンプリング間隔が大きいほど、参考点と参考される点は少なくなり、ポイントペアも少なくなり、実行の速度は速くなります。 |
位置姿勢フィルタリング設定
- 位置姿勢距離に基づいた非最大抑制を使用
-
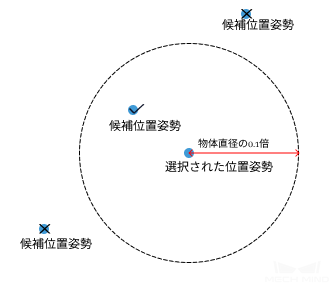
パラメータ説明:このパラメータをオンにすると、選択した位置姿勢からの距離が対象物の直径の0.1倍未満である候補位置姿勢が除外されます。
初期値:オンの状態。
調整説明:調整効果を 調整の例 に示します。
- モデルの回転角度による位置姿勢をフィルタリング
-
パラメータ説明:エッジマッチングモードでは、シーンの点群にマッチングするために点群モデルをある角度だけ回転させる必要がある場合があり、点群モデルの回転角度で位置姿勢が除去されます。モデルの回転角度が「角度差の上限しきい値」を超えると、その位置姿勢は除去されます。
初期値:オンの状態。
- 角度差の上限しきい値
-
詳細については、「モデルの回転角度による位置姿勢をフィルタリング」パラメータの説明をご参照ください。
初期値:135.000°
位置姿勢検証設定
- 単一点群の結果の期待数
-
パラメータ説明:このパラメータは、各入力点群のマッチング位置姿勢の期待数を示します。
初期値:3
調整アドバイス:実際の状況に応じて設定してくだい。調整効果を 調整の例 に示します。
- ボクセル長さの生成戦略
-
パラメータ説明:このパラメータは、ボクセル長さの生成戦略を選択するために使用されます。
オプション:自動生成、手動設定。
初期値:自動生成
調整アドバイス:このステップを始めて使用する場合、 自動生成 を使用することをお勧めします。手動設定 を選択すると、 ボクセル長さ のパラメータを設定できます。
- 最小ボクセル長さ
-
パラメータ説明:このパラメータは、ボクセル長さの最小値(ミリメートル単位)を設定するために使用されます。 初期値:1.000mm
- 最大ボクセル長さ
-
パラメータ説明:このパラメータは、ボクセル長さの最大値(ミリメートル単位)を設定するために使用されます。 初期値:15.000mm
|
点群における空間は3Dグリッドに分割され、 ボクセル長さ は3Dグリッドの最小単位のサイズです。 |
結果可視化の設定
- 可視化オプション
-
パラメータ説明:このパラメータは、可視化する項目を選択するために使用されます。
オプション:サンプリング後のモデル、サンプリング後のシーン、マッチング結果、位置姿勢検証中に点の使用状況。
初期値:マッチング結果。
調整説明:実際のニーズに応じて設定してください。調整効果を 調整の例 に示します。