位置姿勢を変換
使用シーン
通常、位置姿勢がカメラ座標系とロボット座標系との間の相互変換に使用されます。
プロジェクトで直行ロボットが使用されている場合、 位置姿勢を変換(直行ロボット) ステップを使用する必要があります。
パラメータの説明
可視化設定
- 選択された座標系で点群を表示
-
パラメータ説明:ロボット座標系またはカメラ座標系で点群を表示します。
初期値:ロボット座標系。
オプション:ロボット座標系、カメラ座標系。
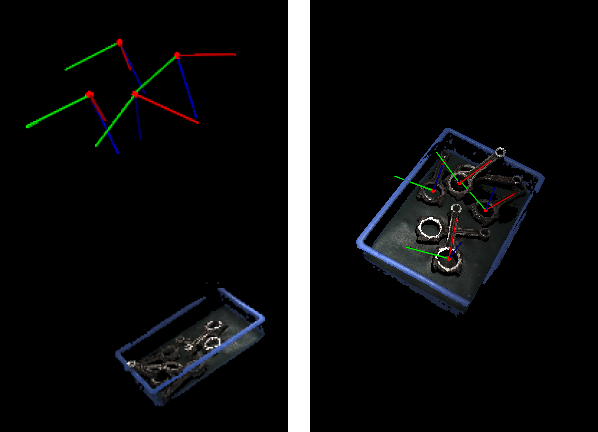
調整説明: カメラ座標系 を選択する場合、デバッグ結果出力のウィンドウにカメラ座標系での可視化出力結果が表示されます。 ロボット座標系 を選択する場合、デバッグ結果出力のウィンドウにロボット座標系での可視化出力結果が表示されます。調整効果を 調整の例 に示します。
このパラメータは、プロジェクトにシーンの点群が設定された場合にのみ設定可能です。
-
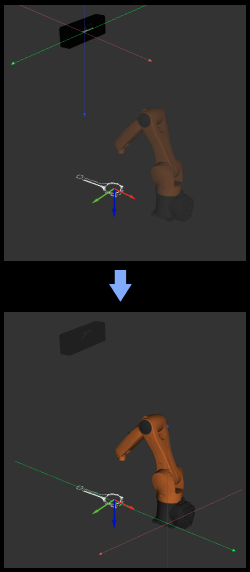
ロボット座標系 を選択すると、デバッグ結果出力のウィンドウが黒い画面になります。点群と座標を表示するには、視点を調整する必要があります。
-
カメラの座標系 を選択すると、デバッグ結果出力のウィンドウには点群のみが表示されます。座標を表示するには、点群の方向を調整する必要があります。
-
- 位置姿勢表示の設定
-
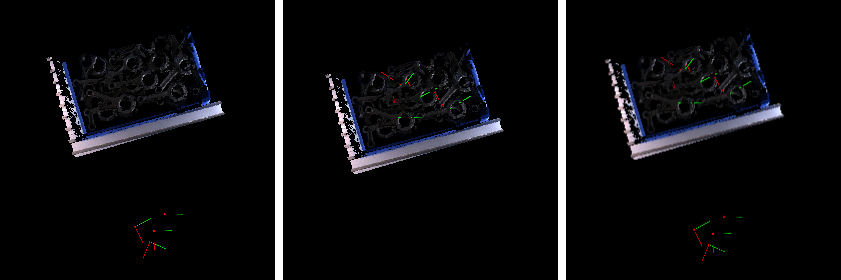
パラメータ説明:このパラメータは、位置姿勢の表示形式を設定するために使用されます。
初期値:出力位置姿勢のみを表示。
オプション:入力位置姿勢のみを表示、出力位置姿勢のみを表示、入力と出力位置姿勢をすべて表示。
調整説明:実際のニーズに応じて選択してください。調整効果を 調整の例 に示します。
変換設定
- 変換方法
-
パラメータ説明:このパラメータは、位置姿勢の変換方法を設定するために使用されます。
初期値:CameraToRobot
オプション:CameraToRobot、RobotToCamera、AllWithFirst、FirstWithAll、UseCorrespondenceInput
調整説明:
-
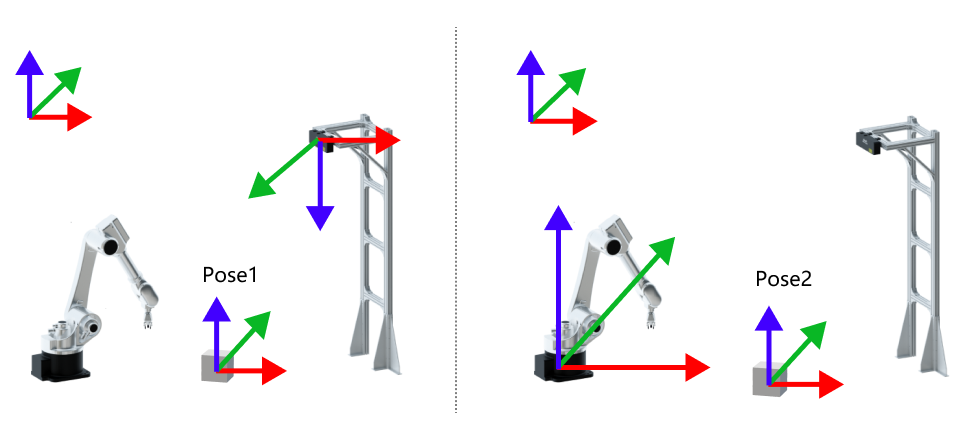
CameraToRobot:カメラ座標系で対象物の位置姿勢はPose1で、「変換方法」を CameraToRobot に設定すると、ロボット座標系での対象物の位置姿勢(Pose2)を出力できます。調整効果を 調整の例 に示します。
-
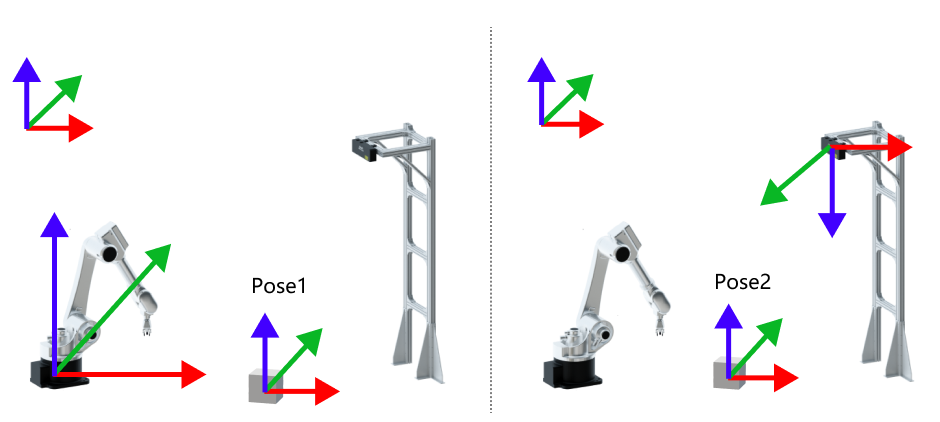
RobotToCamera:ロボット座標系で対象物の位置姿勢はPose1で、「変換方法」を RobotToCamera に設定すると、カメラ座標系での対象物の位置姿勢(Pose2)を出力できます。調整効果を 調整の例 に示します。
-
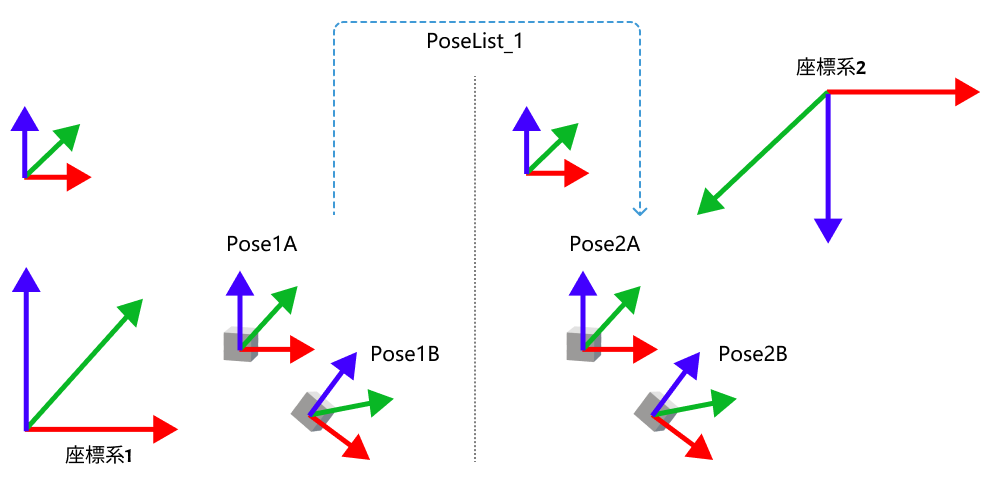
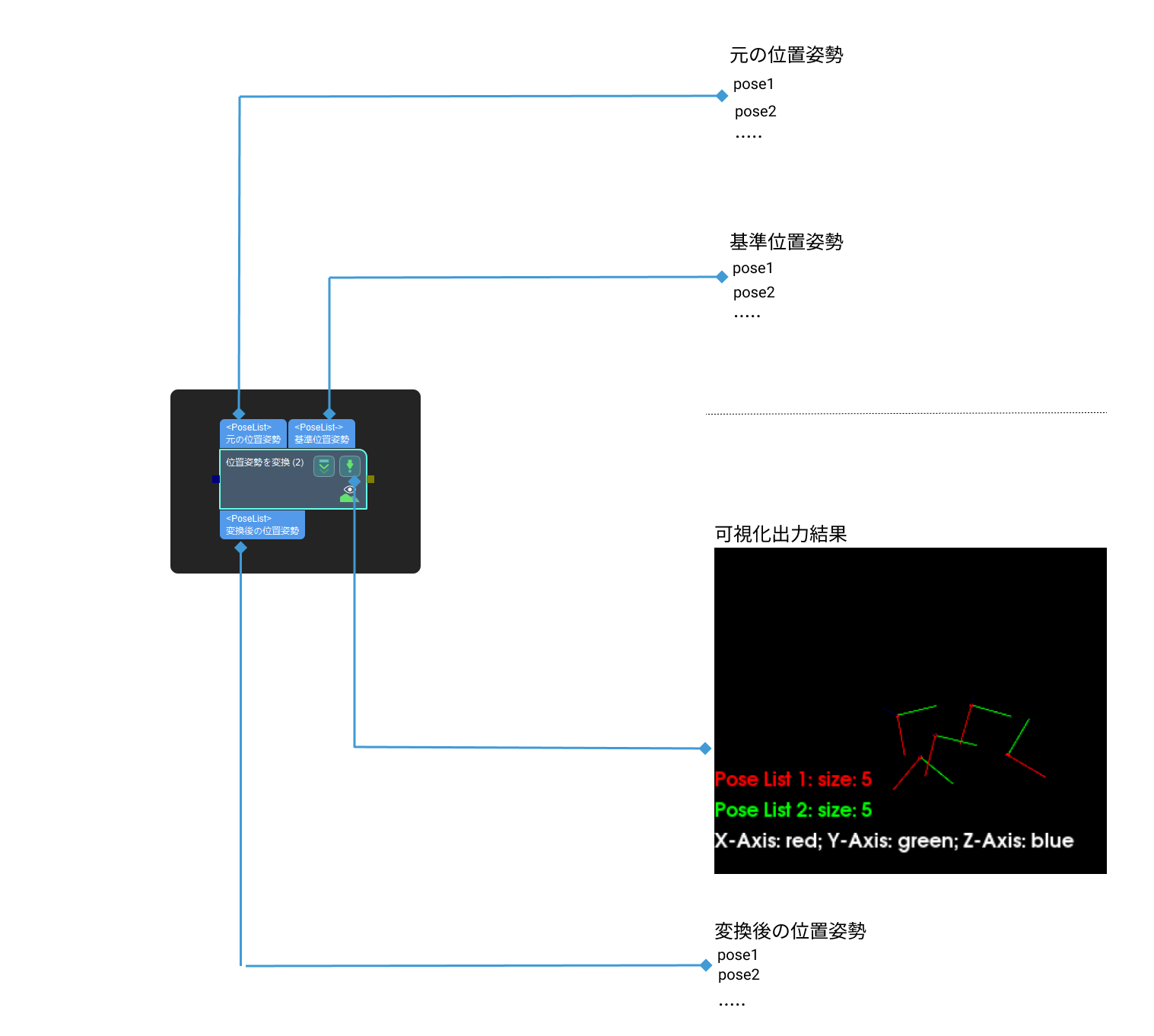
AllWithFirst:座標系1で対象物A、Bの位置姿勢はそれぞれPose1A、Pose1Bで、「変換方法」を AllWithFirst (入力位置姿勢が必要)に設定すると、座標系2での対象物A、Bの位置姿勢(Pose2A、pose2B)を出力できます。この変換中に、変換されるすべての位置姿勢が最初の基準位置姿勢で変換されます。調整効果を 調整の例 に示します。
-
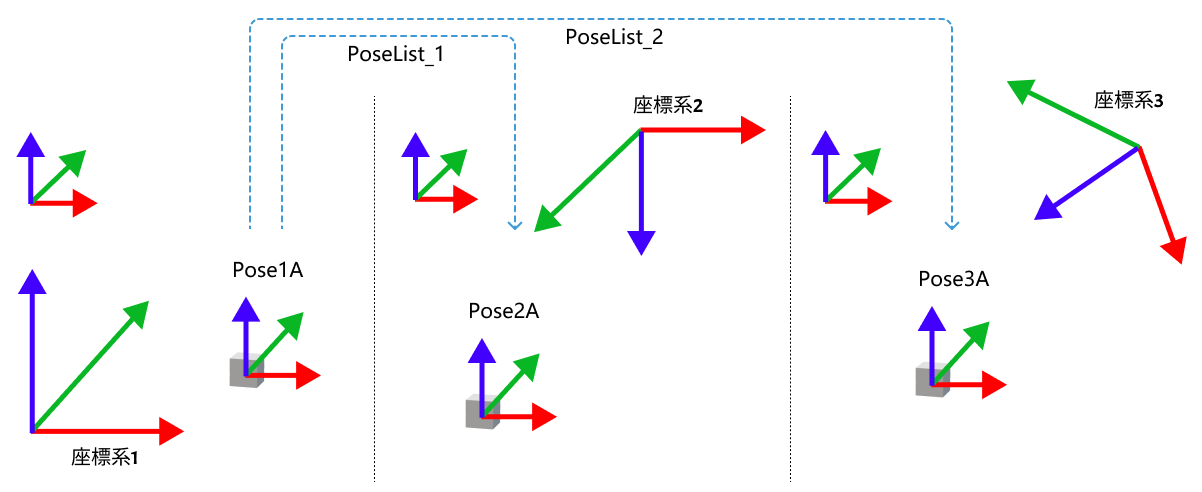
FirstWithAll:座標系1で対象物A、Bの位置姿勢はそれぞれPose1A、Pose1Bで、「変換方法」を FirstWithAll (入力位置姿勢が必要)に設定すると、座標系2と座標系3における対象物Aの位置姿勢(Pose2AとPose3A)を出力できます。この変換中に、変換される最初の位置姿勢がすべての基準位置姿勢で変換されます。調整効果を 調整の例 に示します。
-
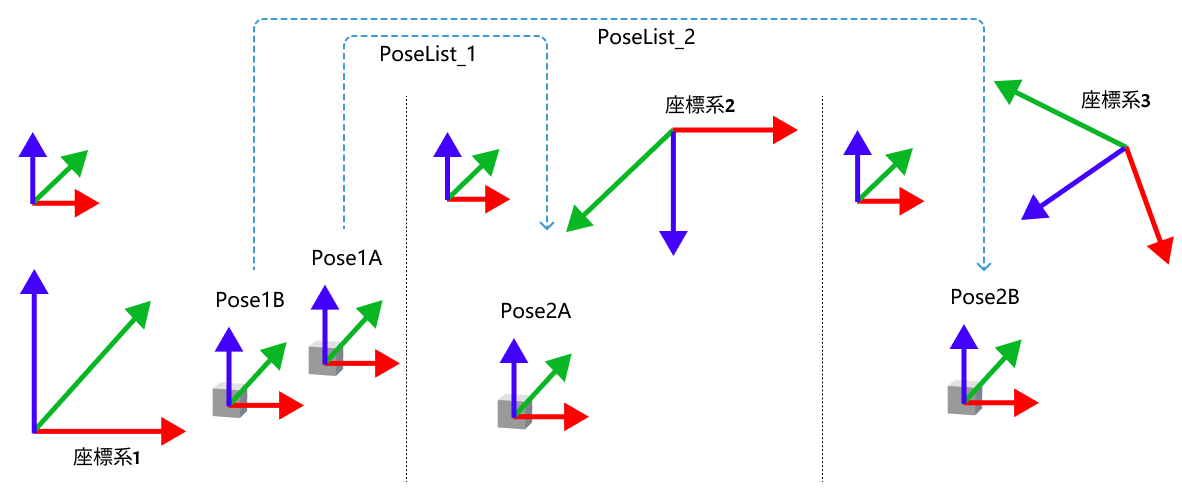
UseCorrespondenceInput:座標系1で対象物A、Bの位置姿勢はそれぞれPose1A、Pose1Bで、「変換方法」を UseCorrespondenceInput (入力位置姿勢が必要)に設定すると、座標系2での対象物Aの位置姿勢(Pose2A)と座標系3での対象物Bの位置姿勢(Pose3B)を出力できます。この変換中に、変換される位置姿勢と基準位置姿勢が1対1でで変換されます。調整効果を 調整の例 に示します。
-