位置姿勢編集ツール
機能
位置姿勢編集ツールの主な機能は、位置姿勢調整の使いやすさを向上させ、編集時の位置姿勢の可視化機能を追加、位置姿勢調整の学習コストを低減することです。
位置姿勢編集ツールには、以下の2つのモードがあります。
-
プリセット編集モード:座標系の変換や調整、ソートなど、プリセットされた一般的な機能により、位置姿勢をすばやく編集することができます。
-
カスタマイズモード:対応するステップを追加して位置姿勢の編集を行います。また、編集済みの位置姿勢が「ツール」で確認できます。
画面
下図に示すように、位置姿勢編集ツールの画面は、主に4つのエリアに分かれています。
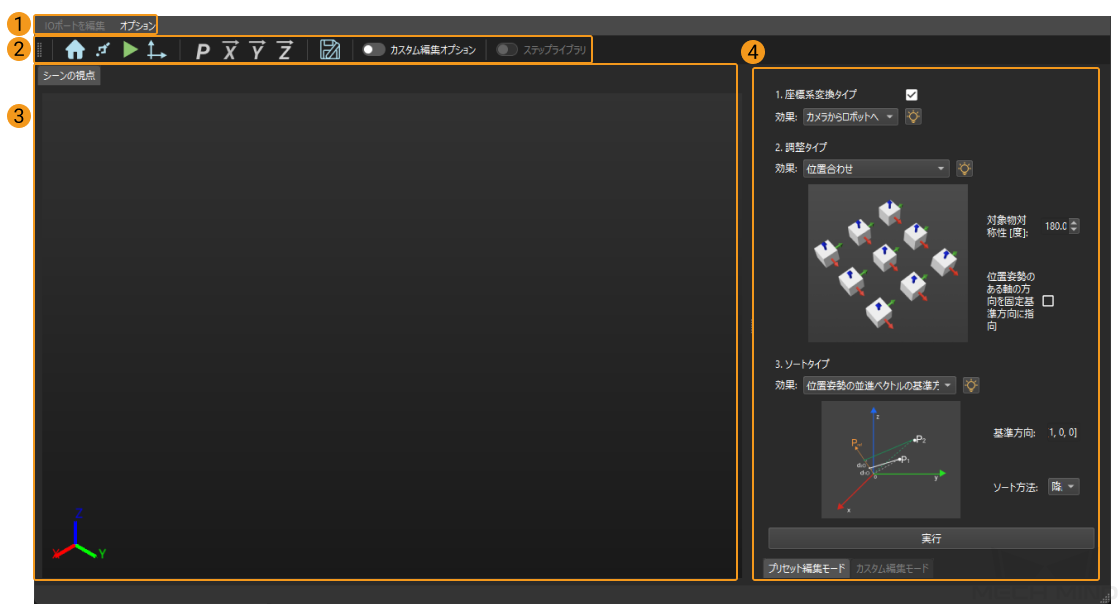
| 項目 | 説明 |
|---|---|
メニューバー |
IOポートの編集やドラッガーの種類の設定に使用されます。 |
ツールバー |
位置姿勢をすばやく編集・調整するために使用されます。 |
シーンの視点(位置姿勢の可視化エリア) |
その後にさらに調整するために、編集後の位置姿勢を確認します。 |
編集エリア |
位置姿勢の調整、編集モードの切替をすばやく実行するために使用されます(編集エリアは、編集モードによって異なります)。 |
モード
プリセット編集モード
プリセット編集モードでは、以下の3つタイプがあります。
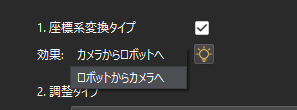
座標系変換 :下図に示すように、カメラからロボットへまたはロボットからカメラへを選択し、位置姿勢の座標系変換を行います。
調整タイプ :「位置合わせ」、「パレットの中心から離れた位置を指す」、「一点を指す」の3種類があります。
ソートタイプ :5つのタイプを選択可能です。1.位置姿勢の並進ベクトルが基準方向に沿って投影する距離によってソートします。2.位置姿勢から基準点までの距離によってソートします。3.位置姿勢からXY平面上の基準点までの投影距離によってソートします。4.位置姿勢のXYZ値によってソートします。5.行または列によってソートします。
使用方法
以下では、あるプロジェクトを例として位置姿勢編集ツールの使用手順について説明します。
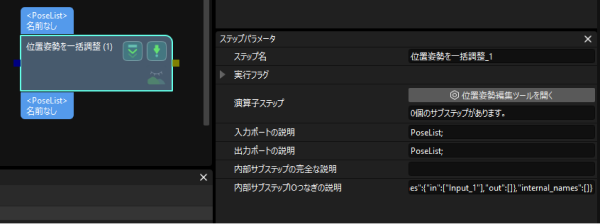
プロジェクトに位置姿勢編集ツールを開くためのステップ 位置姿勢を一括調整 を追加します。
プロジェクトを実行し、入力位置姿勢を取得します。その後、ステップパラメータで ![]() をクリックし、位置姿勢編集ツールを開きます。
をクリックし、位置姿勢編集ツールを開きます。
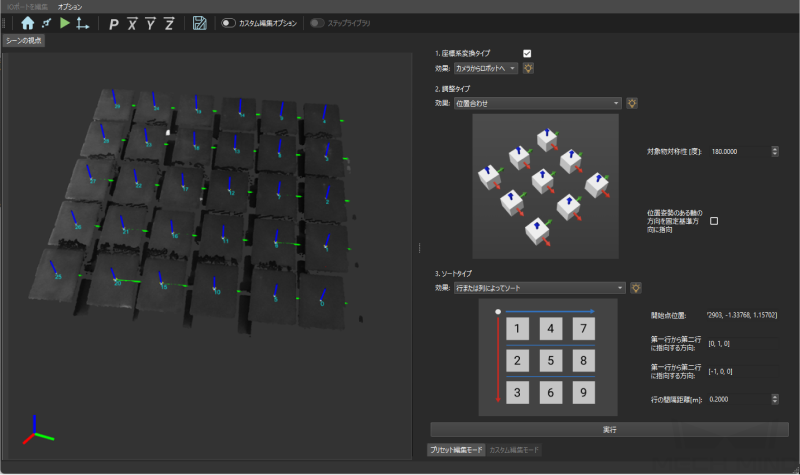
プリセット編集モードを使用する場合、座標系変換タイプ、調整タイプとソートタイプをそれぞれ設定してから、実行をクリックして結果を確認します。位置姿勢変換は下図に示します。
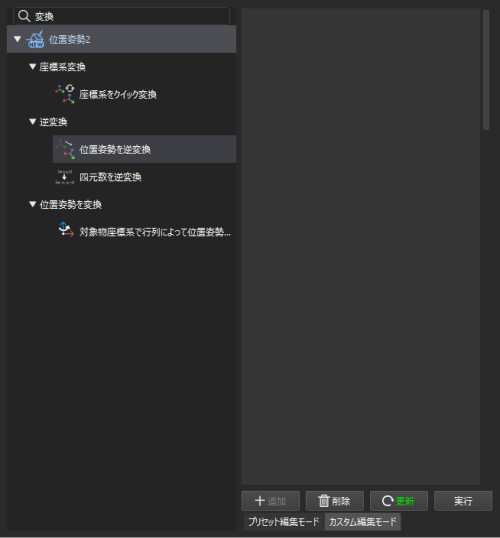
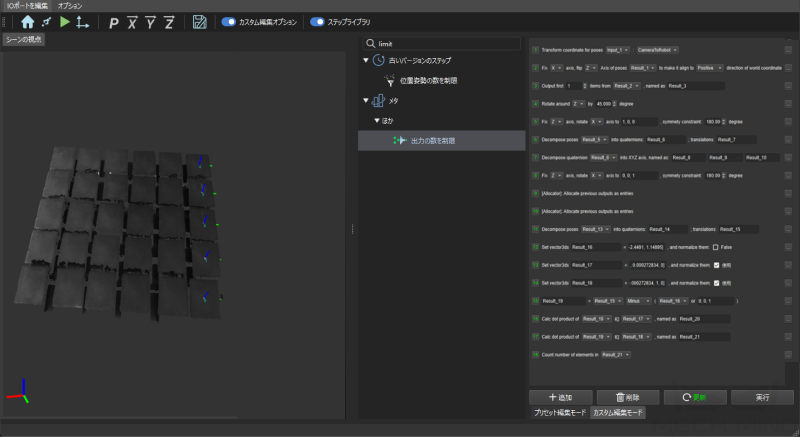
カスタム編集モードを使って出力数の制限を設定する手順は次の通りです。1.カスタム編集モードをクリックします。2.ステップライブラリを表示します。3.表示する出力数を選択します。4.「追加」をクリックします。5.制限数を記入します。6.「実行」をクリックして結果をプレビューします。位置姿勢変換は下図に示します。
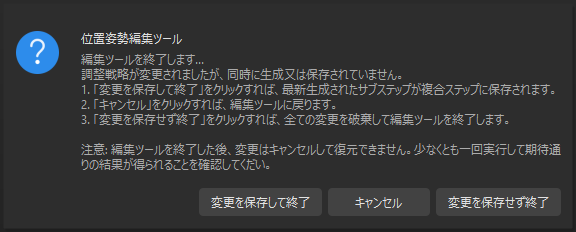
位置姿勢が編集後、「変更を保存して終了」ボタンをクリックして、下図に示すように、編集済みの位置姿勢を保存します。
プロジェクトを実行して、プロジェクトの結果をすばやく確認します。