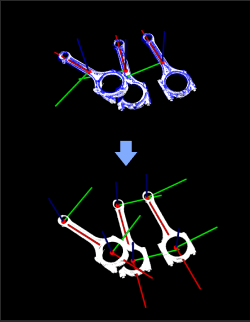
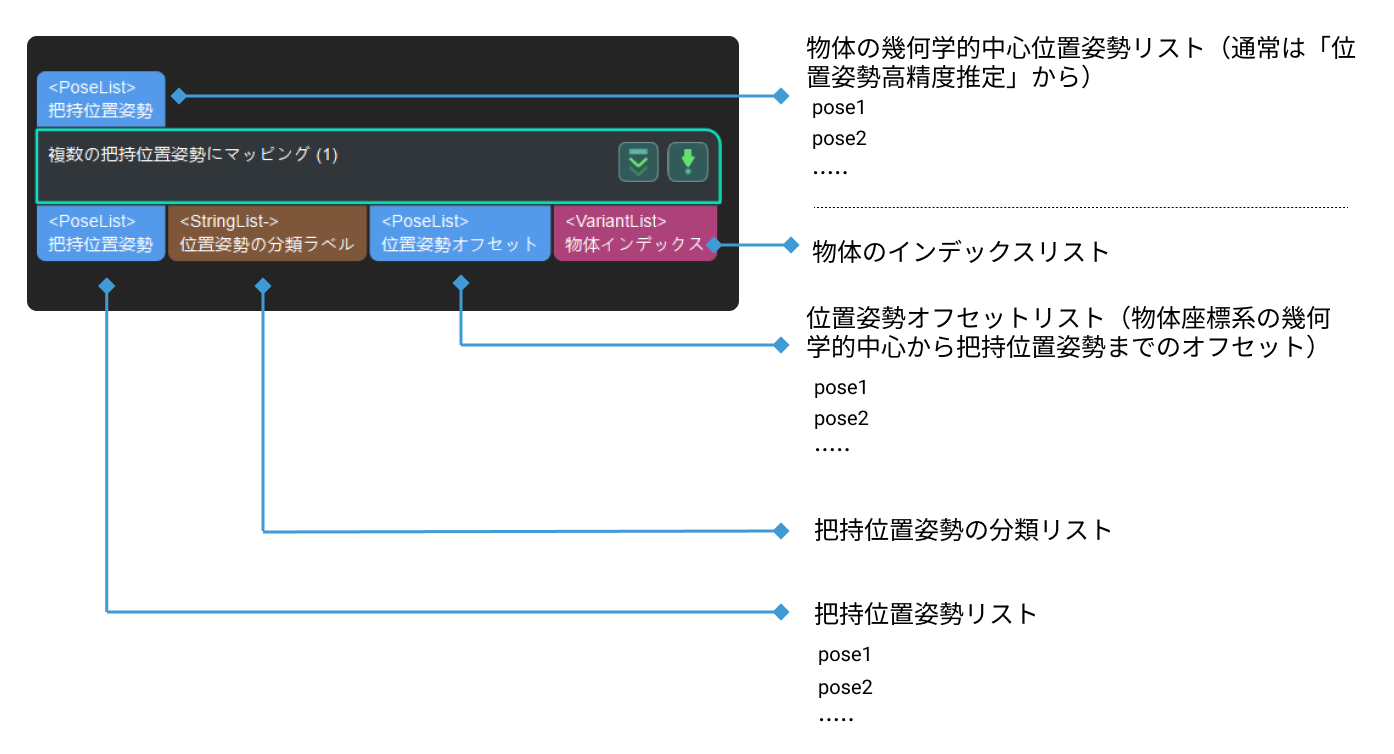
複数の把持位置姿勢にマッピング 現在ご覧いただいているのは1.8.0 バージョンの内容です。異なるバージョンを参照する場合は、画面右上のボタンから切り替えが可能です。 ■ 最新版をご利用される場合は、弊社ホームページよりダウンロードが可能です。ダウンロードにはパスワードが必要となりますので、サポート窓口までお問い合わせください。 ■ ご利用中のバージョンが分からない場合や、サポートが必要な場合はお気軽にサポート窓口までご連絡ください。 機能 物体の幾何学的中心と設定されたマッピング関係を使用して、物体の他の把持位置姿勢を計算します。 使用シーン 把持位置姿勢が幾何学的中心と一致しない場合、または複数の把持位置姿勢がある場合にこのステップが必要です。以下の特定方法を使用してシーン内の対象物にロボット制御ソフトウェアに送信する複数の把持位置姿勢を追加してください。 このステップから出力された「把持位置姿勢」は、 位置姿勢を変換 ステップの「基準位置姿勢」ポートにつなぐ必要があります。 このステップから出力された「位置姿勢オフセット」は、 位置姿勢を変換 ステップの「元の位置姿勢」ポートにつなぐ必要があります。 入力と出力 パラメータの説明 位置姿勢ファイル 幾何学的中心ファイル モデルに対象物の幾何学的中心の位置姿勢 調整説明:幾何学的中心ファイルを保存する絶対パスあるいは相対パス。 配置位置姿勢ファイル 対象物の配置位置姿勢 調整説明:配置位置姿勢ファイルを保存する絶対パスあるいは相対パス。 把持位置姿勢ファイル モデルに対象物の把持位置姿勢 調整説明:把持位置姿勢ファイルを保存する絶対パスあるいは相対パス。 ラベルのインポート(オプション) 位置姿勢ラベルファイル 把持位置姿勢に対応するラベルファイル 調整説明:ラベルファイルを保存する絶対パスあるいは相対パス。 この情報は役に立ちましたか? フィードバックを送信 ありがとうございます! ご意見・ご要望がございましたら、以下よりお寄せください: オンラインコミュニティ フィードバックフォーム 深度画像をカラー画像にマッピング マスクによって画像領域を抽出