位置姿勢を一括調整
使用シーン
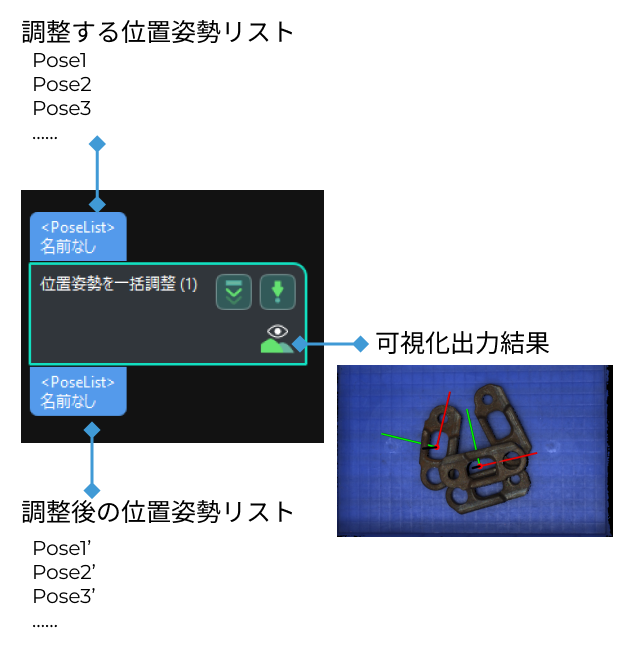
汎用の位置姿勢調整ステップです。
これは古いバージョンのステップであり、より強力な機能を備えた新バージョンのステップ 位置姿勢を一括調整(V2) を使用することをお勧めします。新しいステップには、新しい 位置姿勢編集ツール が組み込まれています。
パラメータの説明
- 演算子ステップ
-
パラメータ説明:このパラメータから編集ツールを開いて位置姿勢を調整できます。
調整説明:パラメータで 位置姿勢編集ツール をクリックしてその画面に入ります。このツールの使用方法については、 位置姿勢編集ツール をご参照ください。
- 入力ポートの説明
-
パラメータ説明:このパラメータは、入力ポートの説明(英語)を設定するために使用されます。セミコロンで区切る必要があります。
調整説明:例えば、Pose; Indexは、それぞれPoselist; IndexListデータ型に対応します。
- 出力ポートの説明
-
パラメータ説明:このパラメータは、出力ポートの説明(英語)を設定するために使用されます。セミコロンで区切る必要があります。
調整説明:例えば、Pose; Indexは、それぞれPoselist; IndexListデータ型に対応します。
- 内部サブステップの完全な説明
-
パラメータ説明:このパラメータは、内部サブステップの完全な説明を入力するために使用されます。
- 内部サブステップIOつなぎの説明
-
パラメータ説明:このパラメータは、内部サブステップIOつなぎの説明を入力するために使用されます。