キャリブレーションボードの位置姿勢の計算とカメラ内部パラメータのチェック
機能
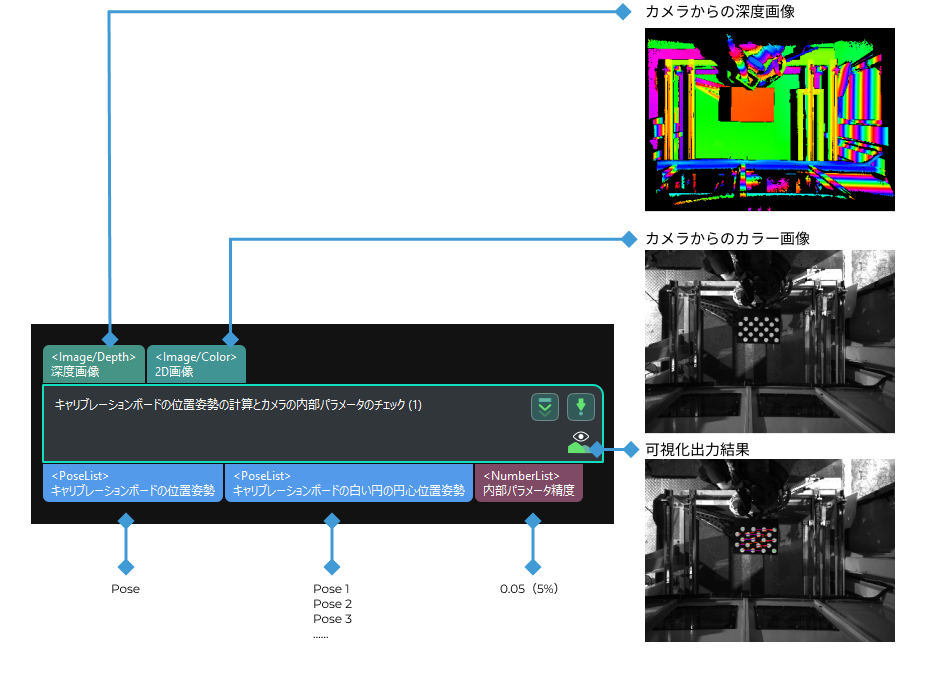
入力カラー画像に基づいてキャリブレーションボードの白い円の中心を検出し、カメラの内部パラメータと入力深度画像を組み合わせてキャリブレーションボードの位置姿勢とキャリブレーションボードの白い円の位置姿勢を生成します。また、キャリブレーションボードの白い円の位置姿勢を使用してカメラの内部パラメータの精度を評価することができます。
|
キャリブレーションボードの白い円とは、キャリブレーションボード上の円の十字型の中心の位置姿勢を指します。 |
パラメータ説明
- キャリブレーションボードの型番
-
パラメータ説明:このパラメータは、キャリブレーションボードの型番を設定するために使用されます。
調整説明:お使いのキャリブレーションボードの型番に合わせて設定します。
- カラー画像のROIファイル
-
パラメータ説明:このパラメータは、2D ROIを設定するために使用されます。
調整説明: エディタを開く をクリックして2D ROIを設定します。
- ハンドアイシステム補正を使用
-
パラメータ説明:キャリブレーション時、ハンドアイシステム(ロボットとカメラ)の精度に問題がある場合、補正パラメータを計算することでハンドアイシステムの精度を向上させることができます。チェックを入れると、キャリブレーションボードの位置姿勢、キャリブレーションボードの白い円の位置姿勢またはカメラの内部パラメータの精度を計算する際に、補正パラメータを使用して誤差を低減します。
初期値:チェックを入れる。