対象物の把持範囲
本節では、対象物の把持範囲について説明します。
概要
一部分の対象物に対しては、ロボットの把持位置姿勢を一定の範囲で微調整することができます。この調整できる範囲を把持範囲といいます。 把持範囲を設定するとロボットが動作するときに衝突や特異点を回避することが可能になります。
配置位置姿勢を「対象物の位置姿勢」に設定した場合、把持範囲を利用して把持を実行するとき、ソフトウェアでは実際の把持位置姿勢と配置位置姿勢との角度が記録されます。 配置を実行するとき、ソフトウェアはロボットハンドが正しい姿勢で対象物を配置するように、この角度によってロボットハンドの姿勢を調整します。
試行範囲と試行間隔
試行範囲は把持位置姿勢とビジョン位置姿勢の偏差角度の最大許容範囲です(下図では、B と C の間の角度が試行範囲となります)。
試行間隔は把持を試行する間隔です(下図では ∠ a は試行間隔となります)。
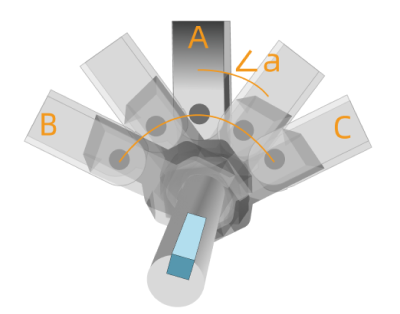
A はロボットハンドの把持位置姿勢で、B と C は把持を実行できる範囲の限界角度です。