重複対象物を除去(V2)
使用シーン
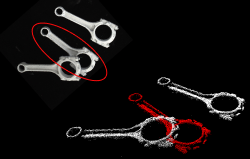
通常、ステップ 3D位置姿勢高精度推定 の後で使用されます。重なっているため、把持などの処理に適さない対象物の位置姿勢を除去するために使用されます。
|
重複対象物を除去(V2) ステップは投影法(2D)を最適化しました。投影法(2D)を使用する場合、 重複対象物を除去(V2) を推奨します。 重複対象物を除去(V2) は境界ボックス法(3D)を変更しませんでした。境界ボックス法(3D)を使用する場合、 重複対象物を除去 と 重複対象物を除去(V2) の両方を使用できます。 |
パラメータの説明
このステップでは、対象物が積み重ねられているかどうかを判断する方法が2つ用意されています。
-
境界ボックス(3D):点群の境界ボックスを小さな立方体に分割し、重なっている小さな立方体の数で重なり率を計算します。
-
投影(2D):対象物が2D平面に投影する重なり領域の割合を計算し、積み重ねられているかどうかを判断します。
方法設定
- 方法
-
調整説明:このパラメータは、積み重ねられた対象物を除去する方法を選択するために使用されます。
オプション:境界ボックス(3D)、投影(2D)。
境界ボックス(3D) :プロジェクトで3Dマッチングを使用しない場合や、3Dマッチングのエッジマッチングを使用する場合に推奨されます。この方法は、対象物が3D境界ボックスによって対象物が重なっているかどうかを判断するします。3D境界ボックスとは、対象物の中心を中心とし、位置姿勢のX、Y、Z軸に平行な辺を持つ直方体のことを指します。
-
投影(2D) :プロジェクトで3Dマッチングを使用し、マッチング方式がサーフェスマッチングの場合に推奨されます。2D平面に投影された重なり領域の割合を計算することで、対象物が重なっているかどうかを判断するします。この方法を使用する場合、 重複比率のしきい値 を設定するだけで、他のパラメータの設定は必要ありません。
調整アドバイス:実際のニーズに応じて選択してください。
-
境界ボックス(3D)
しきい値設定
- 重複比率のしきい値 (0–1.0)
-
パラメータ説明:重複比率とは、境界ボックスのと他の境界ボックスと重なる部分の割合のことです。このパラメータは、積み重ねられた対象物のビジョン結果を除去するかどうかを設定するために使用されます。対象物の点群と他の対象物の点群との重複領域の比率がこのしきい値を超えると、その対象物のビジョン結果は除去されます。
値の範囲:0.00~1.00
初期値:0.30
調整アドバイス:実際のニーズに応じて、0.01のステップサイズで 重複比率のしきい値 を調整できます。調整効果を 調整の例 に示します。
点群の解像度設定
- 対象物の点群の対角線長さの比率
-
パラメータ説明:このパラメータは、境界ボックスを小さな立方体に分割するために使用されます。重複比率しきい値は、重複する小さな立方体の数によって計算されます。小さな立方体の辺長は、対象物の点群の対角線長さの比率に対象物の点群の対角線長さを掛けたものにです。
初期値:2.00%
調整アドバイス:実際の状況に応じて設定してくだい。
対象物高さの設定
- 対象物高さの計算方法
-
パラメータ説明:このパラメータは、対象物高さの計算方法を選択するために使用されます。
オプション:高さを指定、点群から計算(初期値)。
-
高さを指定:パラメータ 指定された高さ の値を設定することで、固定対象物の高さを指定します。
-
点群から計算:対象物の高さは入力点群に従って自動的に計算されます。
調整アドバイス:平らかな点群、または対象物の形状を反映できない点群の場合、対象物の高さを指定する必要があります。
-
- 高さを指定
-
パラメータ説明:このパラメータは、対象物の高さ(ミリメートル単位)を指定するために使用されます。対象物高さの計算方法 が 高さを指定 に設定された場合、このパラメータを設定する必要があります。
初期値:100.000mm
調整アドバイス:実際の状況に応じて設定してくだい。
境界ボックスの拡張
- 境界ボックスのX方向の拡張率
-
パラメータ説明:境界ボックスを対象物の位置姿勢のX軸に沿って膨張し、重なりをより精確に検出することができます。
初期値:1.0000
調整アドバイス:実際の状況に応じて設定してくだい。
- 境界ボックスのY方向の拡張率
-
パラメータ説明:境界ボックスを対象物の位置姿勢のY軸に沿って膨張し、重なりをより精確に検出することができます。
初期値:1.0000
調整アドバイス:実際の状況に応じて設定してくだい。
- 境界ボックスのZ方向の拡張率
-
パラメータ説明:境界ボックスを対象物の位置姿勢のZ軸に沿って膨張し、重なりをより精確に検出することができます。対象物高さの計算方法 が 高さを指定 に設定された場合、このパラメータを設定する必要はありません。
初期値:3.0000
調整アドバイス:実際の状況に応じて設定してくだい。
投影(2D)
しきい値設定
- 重複比率のしきい値 (0–1.0)
-
パラメータ説明:重複比率とは、他のマスクと重なる部分の割合のことです。このパラメータは、積み重ねられた対象物のビジョン結果を除去するかどうかを設定するために使用されます。対象物の点群と他の対象物の点群との重複領域の比率がこのしきい値を超えると、その対象物のビジョン結果は除去されます。
初期値:0.30
値の範囲:0.00~1.00
調整アドバイス:実際のニーズに応じて、0.01のステップサイズで 重複比率のしきい値 を調整できます。調整効果を 調整の例 に示します。
詳細設定
|
すべてのパラメータを表示 に設定された場合のみに表示されます。 |
- 投影のタイプ
-
パラメータ説明:このパラメータは、投影のタイプを選択するために使用されます。
オプション:透視投影(初期値)、正投影。
正投影:対象物の大きさが視野の深さに応じて伸びることがありません。
-
透視投影:対象物の大きさは視野の深さに応じて伸びます。
調整アドバイス:実際の状況に応じて設定してくだい。
-
- 膨張カーネルサイズ
-
パラメータ説明:このパラメータは、投影された2D画像上の空白ピクセルを避けるために、投影画像を膨張するためのカーネルサイズを設定するために使用されます。
初期値:1
調整アドバイス:実際の状況に応じて設定してくだい。
- ダウンサンプリング係数
-
パラメータ説明:このパラメータは、ダウンサンプリング係数を設定するために使用されます。処理を高速化するために、投影後の画像をダウンサンプリングします。投影のタイプ が 透視投影 に設定された場合、このパラメータを設定する必要があります。例えば、係数を2に設定すると、100\*100の画像が50*50になります。
初期値:2
調整アドバイス:実際の状況に応じて設定してくだい。
- 正投影の解像度
-
パラメータ説明:このパラメータは、正投影で形成された2D画像上の単位長さあたりのピクセル数です。投影のタイプ を 正投影 に設定した場合、このパラメータを設定する必要があります。
初期値:500.0000
調整アドバイス:実際の状況に応じて設定してくだい。
- モデル周りの点群除去範囲
-
パラメータ説明:入力位置姿勢とモデルから点群を生成する際、生成された点群の周囲で、このパラメータで設定された範囲内のシーンの点群が除去されます。残りの点群は、重なり検出に関与することになります。単位はミリメートル(mm)です。
初期値:3.000mm
|
シーンの点群とは、カメラ視野内にあるすべての点群のことを指します。 |
- 可視化オプション
-
パラメータ説明:このパラメータは、可視化する項目を選択するために使用されます。
オプション:フィルタリング後の結果、ハイライト表示の除去されたシーンの点群、投影画像。
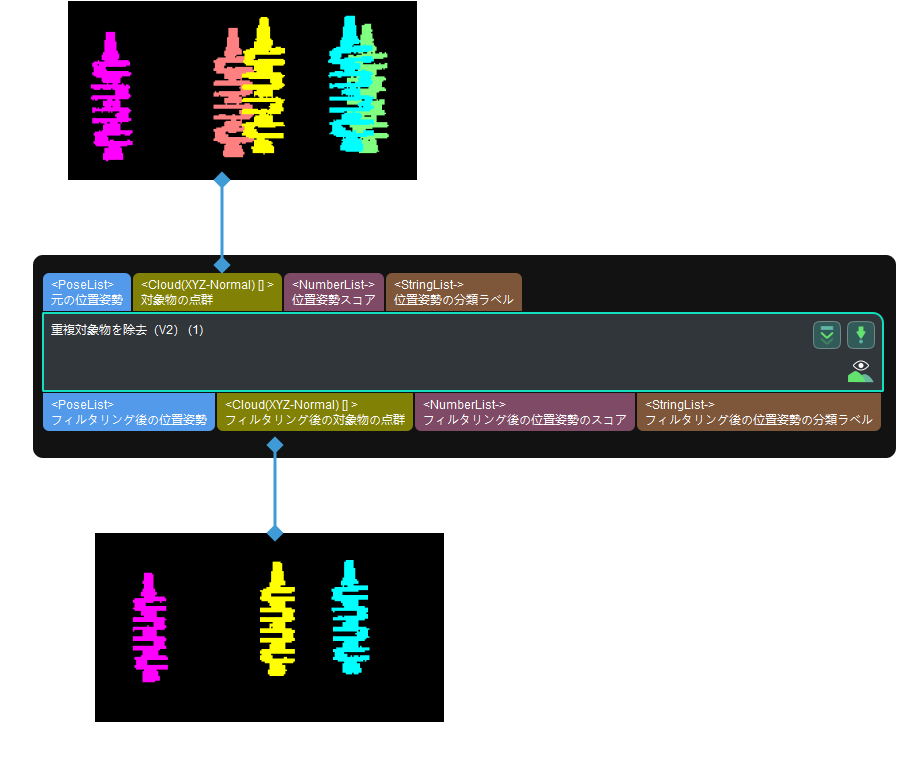
フィルタリング後の結果:デバッグ結果出力のウィンドウで、重複対象物が除去された後の結果を確認できます。
-
ハイライト表示の除去されたシーンの点群:シーンの点群は、特に未認識の対象物の部分について、重なり検出を有効にする必要があります。重なり検出を実行する前に、シーン点群の認識された対象物を除去し、対象物の点群のためのスペースを確保する必要があります。対象物とは、入力位置姿勢とモデルによって生成された点群のことを指します。
-
投影画像:リストの最初の対象物の投影を確認し、投影の効果をプレビューします。
調整アドバイス:実際の状況に応じて設定してくだい。調整効果を 調整の例 に示します。
-



