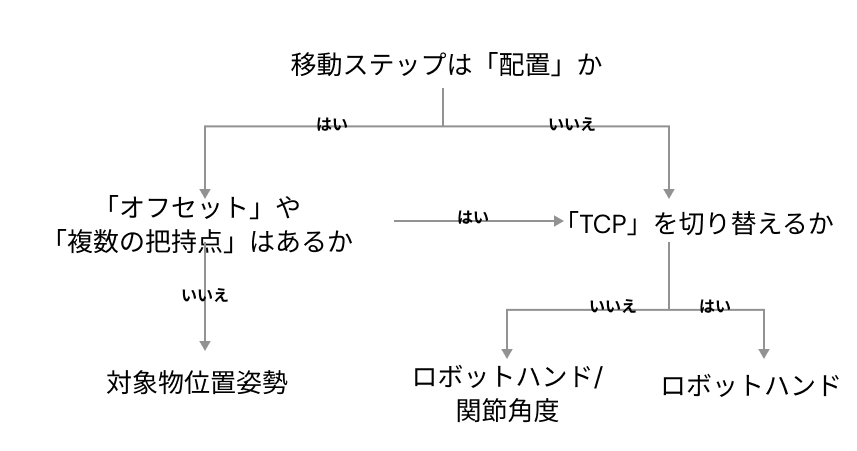
目標点タイプ
説明
TCP |
ロボットハンド座標系の X、Y、Z 値、およびオイラー角または四元数によって目標点を表示します。
|
関節角度 |
ロボットの各関節の数値で経路点を表示します。
|
対象物位置姿勢 |
ロボットハンド座標系の X、Y、Z 値、およびオイラー角または四元数によって目標点を表示します。ロボット実機が運動する時に対象物の位置と向きを示します。
|
下図のように目標点タイプを選択します。
パラメータ説明
位置姿勢を編集 |
位置姿勢を編集します。コピーと貼り付けができ、四元数とオイラー角の二つの形式に対応しています。 |
位置姿勢を変換 |
変換を定義することで現在の位置姿勢を新しい位置姿勢に変換します。 |
位置姿勢を校正 |
ABB ロボット三点法と類似しており、対象物の座標系を計算します。対象物の回転位置姿勢を確認できない場合に使用します。例えば、傾斜した直方体に対し、位置姿勢を校正することでその位置姿勢を計算し、ロボットが計算された位置姿勢に沿って動作させることが可能です。 |
関節角度を編集 |
位置姿勢を調整する方法と同じく、コピーと貼り付けができます。ラジアンと角度の二つの形に対応可能です。 |
|
現在の仮想ロボットの位置姿勢を取得します。 |
|
仮想ロボットを設定した位置姿勢に移動します。 |
|
可能な関節角度の解を全部表示します。 |


