深度画像から点群を分割
使用シーン
通常、大型部品の測定シーンに使用されます。前に カメラから画像を取得 をつなぎ、深度画像を取得します。後に 平面点群を抽出 をつなぎ、点群を平面点群に変換します。
パラメータ説明
深度画像分割
以下のパラメータはすべて、深度画像を分割し、期待される点群を取得するために使用されます。
- 隣接するピクセル領域間の最大値の差
-
パラメータ説明:深度画像を複数の領域に分割する処理において、隣接するピクセル間の最大高さの差を指定するため使用されます。隣接するピクセルの高さの差がこの値より小さい場合、そのピクセルは同じ領域にあります。値が大きいほど、分割する領域は多くなります。
初期値:0.5mm
調整アドバイス:平面を分割する場合、このパラメータを適切に上げます。ただし、値を大きくしすぎると、分割領域が小さくなりすぎて結果が出ない場合があるので注意が必要です。曲面やネジ穴を分割する場合は、必要な点群が失われないよう、この値を小さく調整することを推奨します。点群の付着が激しい場合、この値を調整しても不要な点群が除去されないことがあります。
- 対象物の最小面積
-
パラメータ説明:このパラメータは、深度画像の分割後に許可される最小領域を指定するために使用されます。この値より少ないピクセル数の領域は除去されます。単位はピクセル(px)です。値が小さいほど残る領域が多くなり、値が大きいほど除去される領域が多くなります。
初期値:1500px
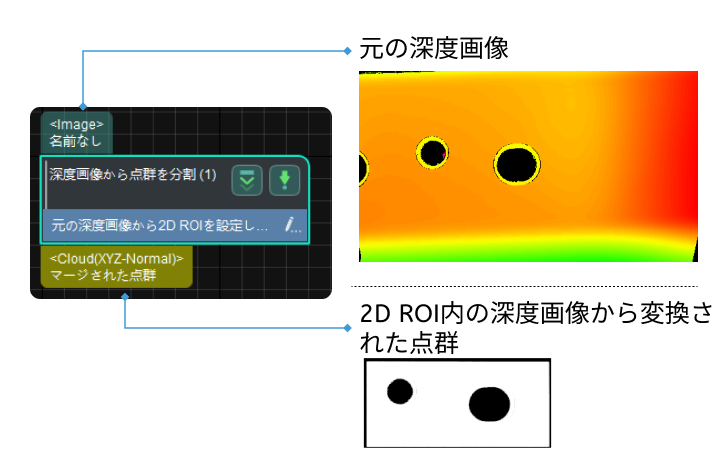
- 深度画像のROIファイル
-
パラメータ説明:このパラメータは、深度画像の関心領域を設定するために使用されます。
調整アドバイス: 2D ROIを設定 をクリックし、2D関心領域 を正しく設定します。