定義済みのソート方法による位置姿勢をソート
以下では、定義済みのソート方法で位置姿勢をソートする方法について説明します。
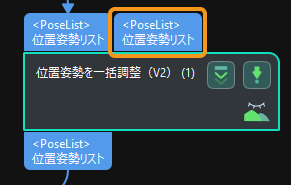
6つのソート方法に対応し、ドロップダウンバーから追加することができます。
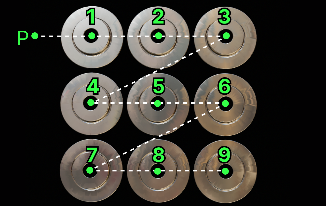
平面上のS形状でソート
使用方法
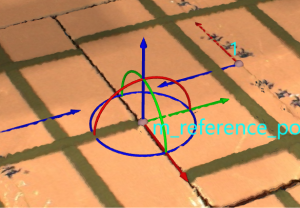
基準位置姿勢
基準位置姿勢は、 マニピュレータによる設定 と 外部ステップによる入力 の2つ方法で設定可能です。詳細は下表の通りです。
番号 |
基準位置姿勢の設定方法 |
説明 |
方法 |
サンプル図 |
1 |
マニピュレータによる設定 |
マニピュレータの位置姿勢を設定することで基準位置姿勢を設定します。 |
|
|
2 |
外部ステップによる入力 |
その他のステップから基準位置姿勢を入力します。 |
|
|
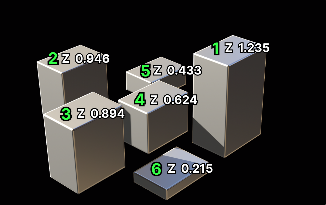
平面上のZ形状でソート
使用方法
基準位置姿勢
基準位置姿勢は、 マニピュレータによる設定 と 外部ステップによる入力 の2つ方法で設定可能です。詳細は下表の通りです。
番号 |
基準位置姿勢の設定方法 |
説明 |
方法 |
サンプル図 |
1 |
マニピュレータによる設定 |
マニピュレータの位置姿勢を設定することで基準位置姿勢を設定します。 |
|
|
2 |
外部ステップによる入力 |
その他のステップから基準位置姿勢を入力します。 |
|
|
位置姿勢から基準位置姿勢までの距離でソート
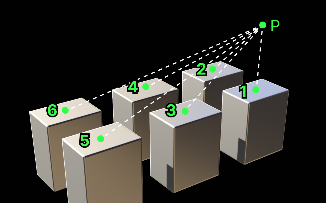
使用方法
基準位置姿勢
基準位置姿勢は、 マニピュレータによる設定 と 外部ステップによる入力 の2つ方法で設定可能です。詳細は下表の通りです。
番号 |
基準位置姿勢の設定方法 |
説明 |
方法 |
サンプル図 |
1 |
マニピュレータによる設定 |
マニピュレータの位置姿勢を設定することで基準位置姿勢を設定します。 |
|
|
2 |
外部ステップによる入力 |
その他のステップから基準位置姿勢を入力します。 |
|
|
位置姿勢から基準位置姿勢のXOY平面までの投影距離でソート
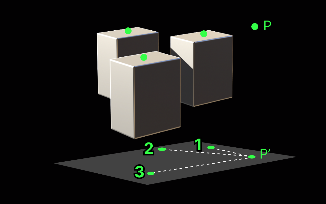
使用方法
基準位置姿勢
基準位置姿勢は、 マニピュレータによる設定 と 外部ステップによる入力 の2つ方法で設定可能です。詳細は下表の通りです。
番号 |
基準位置姿勢の設定方法 |
説明 |
方法 |
サンプル図 |
1 |
マニピュレータによる設定 |
マニピュレータの位置姿勢を設定することで基準位置姿勢を設定します。 |
|
|
2 |
外部ステップによる入力 |
その他のステップから基準位置姿勢を入力します。 |
|
|